
DESIGN OF MACHINERY
6th Edition
ISBN: 9781260113310
Author: Norton
Publisher: RENT MCG
expand_more
expand_more
format_list_bulleted
Videos
Textbook Question
Chapter 3, Problem 3.90P
Design a fourbar
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
The link lengths, value of theta2, and offset for some fourbar slider-crank linkages are defined inTable P4-2. The linkage configuration and terminology are shown in Figure P4-2. For row a,draw the linkage to scale and graphically find all possible solutions (both open and crossed)for angles theta3 and slider position d.
Figure Q2-2 shows a schematic of a retractable landing gear of aircraft.
The retraction mechanism is a 4 bar linkage (O1ABO2), which is actuated
by a hydraulic cylinder and piston, D, pivoted at E with a joint at C to link
O,A.
Hydraulic cylinder
& piston D
Joint for landing
gear wheel
Figure Q2-2
Use the Gruebler's equation of DoF (Degrees of Freedom) of a
linkage mechanism to assess if the landing gear produces the
required retraction motion. 0,02 may be considered as the ground
link.
i)
Hint: The joint of the wheel is not part of the linkage mechanism.
The number of DoF may be used to check if it is a linkage with
certain motions or a fixed structure.
ii)
The dimensions of the 4 bar linkage (O1ABO2) are measured as
O102 = 800 mm, O1A = 780 mm, AB = 200 mm and O2B = 400
mm. Use Grashof condition to determine the specific type of this
linkage.
You may find the Gruebler's equation useful:
M = 3(L – 1) – 2J
where, M is degree of freedom (DoF)
L is number of links
J is number of joints
3-4 Design a fourbar mechanism to give the two positions shown in Figure P3-1 of coupler
motion. (See Example 3-3, p. 105.) Build a model and determine the toggle positions and
the minimum transmission angle from the model. Add a driver dyad.
2.409
2.656
B2
0.751
0.470
1.750
A2
B.
1.721
FIGURE P3-1
Chapter 3 Solutions
DESIGN OF MACHINERY
Ch. 3 - Define the following examples as path, motion, or...Ch. 3 - Design a fourbar Grashof crank-rocker for 90 of...Ch. 3 - Prob. 3.3PCh. 3 - Design a fourbar mechanism to give the two...Ch. 3 - Prob. 3.5PCh. 3 - Prob. 3.6PCh. 3 - Repeat Problem 3-2 with a quick-return time ratio...Ch. 3 - Design a sixbar drag link quick-return linkage for...Ch. 3 - Design a crank-shaper quick-return mechanism for a...Ch. 3 - Find the two cognates of the linkage in Figure...
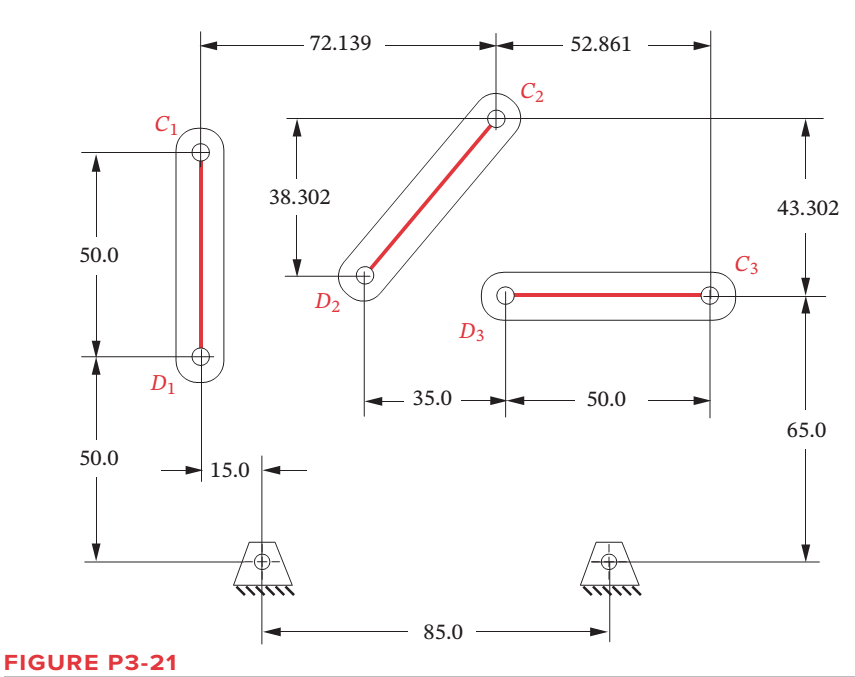
Ch. 3 - Find the three equivalent geared fivebar linkages...Ch. 3 - Design a sixbar single-dwell linkage for a dwell...Ch. 3 - Design a sixbar double-dwell linkage for a dwell...Ch. 3 - Figure P3-3 shows a treadle-operated grinding...Ch. 3 - Figure P3-4 shows a non-Grashof fourbar linkage...Ch. 3 - Prob. 3.16PCh. 3 - Prob. 3.17PCh. 3 - Prob. 3.18PCh. 3 - Design a pin-jointed linkage that will guide the...Ch. 3 - Figure P3-6 shows a V-link off-loading mechanism...Ch. 3 - Prob. 3.21PCh. 3 - Prob. 3.22PCh. 3 - Figure P3-8 shows a fourbar linkage used in a...Ch. 3 - Prob. 3.24PCh. 3 - Prob. 3.25PCh. 3 - Prob. 3.26PCh. 3 - Prob. 3.27PCh. 3 - Prob. 3.28PCh. 3 - Prob. 3.29PCh. 3 - Prob. 3.30PCh. 3 - Design a Hoeken straight-line linkage to give...Ch. 3 - Design a Hoeken straight-line linkage to give...Ch. 3 - Prob. 3.33PCh. 3 - Prob. 3.34PCh. 3 - Prob. 3.35PCh. 3 - Find the Grashof condition, inversion, any limit...Ch. 3 - Prob. 3.37PCh. 3 - Prob. 3.38PCh. 3 - Prob. 3.39PCh. 3 - Draw the Roberts diagram and find the cognates of...Ch. 3 - Prob. 3.41PCh. 3 - Find the Grashof condition, any limit positions,...Ch. 3 - Prob. 3.43PCh. 3 - Prob. 3.44PCh. 3 - Prob. 3.45PCh. 3 - Prob. 3.46PCh. 3 - Prob. 3.47PCh. 3 - Prob. 3.48PCh. 3 - Prob. 3.49PCh. 3 - Prob. 3.50PCh. 3 - Prob. 3.51PCh. 3 - Prob. 3.52PCh. 3 - Prob. 3.53PCh. 3 - Prob. 3.54PCh. 3 - Prob. 3.55PCh. 3 - Prob. 3.56PCh. 3 - Prob. 3.57PCh. 3 - Prob. 3.58PCh. 3 - Prob. 3.59PCh. 3 - Prob. 3.60PCh. 3 - Prob. 3.61PCh. 3 - Prob. 3.62PCh. 3 - Prob. 3.63PCh. 3 - Prob. 3.64PCh. 3 - Prob. 3.65PCh. 3 - Prob. 3.66PCh. 3 - Design a fourbar Grashof crank-rocker for 120 of...Ch. 3 - Prob. 3.68PCh. 3 - Design a fourbar Grashof crank-rocker for 80 of...Ch. 3 - Design a sixbar drag link quick-return linkage for...Ch. 3 - Design a crank shaper quick-return mechanism for a...Ch. 3 - Design a sixbar, single-dwell linkage for a dwell...Ch. 3 - Design a sixbar, single-dwell linkage for a dwell...Ch. 3 - Prob. 3.74PCh. 3 - Using the method of Example 3-11, show that the...Ch. 3 - Prob. 3.76PCh. 3 - Prob. 3.77PCh. 3 - Prob. 3.78PCh. 3 - The first set of 10 coupler curves on page 1 of...Ch. 3 - Prob. 3.80PCh. 3 - Prob. 3.81PCh. 3 - Prob. 3.82PCh. 3 - Prob. 3.83PCh. 3 - Prob. 3.84PCh. 3 - Prob. 3.85PCh. 3 - Prob. 3.86PCh. 3 - Prob. 3.87PCh. 3 - The side view of the upper section of a...Ch. 3 - Design a fourbar mechanism to give the three...Ch. 3 - Design a fourbar mechanism to give the three...Ch. 3 - Design a fourbar Grashof crank-rocker for 60...Ch. 3 - Design a crank-shaper quick-return mechanism for a...Ch. 3 - Figure P3-22 shows a non-Grashof fourbar linkage...Ch. 3 - Prob. 3.94PCh. 3 - Design a fourbar Grashof crank-rocker for 80...Ch. 3 - Design a sixbar drag link quick-return linkage for...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Draw the kinematic diagram of the following mechanism by labelling the links and the joints and calculate its mobility / DOF.arrow_forwardThe linkage in Figure P7-5b has 04A = O2A = 0.75 , AB = 1.5 , and AC = 1.2 in . The effective crank angle in the position shown is 77º and angle BAC = 30 ° . Find a3 , AA , AB , Ac for the position shown for m2 = 15 rad / sec and a2 = 10 rad / sec2 in the directions shown using an analytical method . ( Hint : Create an effective linkage for the position shown and analyze it as a pin - jointed fourbar . ) the linkage has a parallelogram form Assume rolling contact C 02 A 3 . B 02 02 Tarrow_forwardProblem 2 The linkage in Figure P7-5b has O,A = O2A = 0.75, AB= 1.5, and AC = 1.2 in. The effective crank angle in the position shown is 77° and angle BAC = 30°. Find a3, A4, AB,Ac for the position shown for @2 = 15 rad/sec and a2 = 10 rad/sec in the directions shown using an analytical method. (Hint: Create an effective linkage for the position shown and analyze it as a pin-jointed fourbar.)the linkage has a parallelogram form Assume rolling contact C @2 A 3 В a2 2 4 04arrow_forward
- 3. The four bars of Figure A are initially free in the plane, then connecting to bars 2, 3 and 4, through their pivots, to bar 1, as shown in figure B. Choose a generalized coordinate system for these bars in design A and, depending on this system, determine the number of degrees of freedom after assembly, as shown in design B y 3 A B Xarrow_forwardOestion-1: An elliptical trammel is a double slider-crank mechanism used for drawing ellipses as shown in figure (a) below. Position vectors for various linkages are drawn as shown in figure (b). Where: R2: represents position vector for a Slider which can slide along x-axis only R4: represents position vector for a Slider which can slide along y-axis only R3 represents position vector for a crank (Take R3 = 10mm, 03 = 45°, V3 = 10mm/sec) Rix: This is aligned with x-axis and represents fixed position of slider (R4) from ground RIY: This is aligned with Y-axis and represents fixed position of slider (R2) from ground Take: R13= 20mm, Rịy=40mm. Assume crank is rotating with constant velocity Note: all angles are measured counterclockwise from x-axis. a) Formulate the vector loop, position, velocity and acceleration equations b) Simplify the equations by plugging in respective angles and solve to find R2, R4, linear velocities of both sliders and angular acceleration of crank. c) Identify…arrow_forwardFigure below shows a four-bar linkage (non-scaled diagram) at an instant. The input angle is equal to the output angle (02 - 04) and the transmission angle is 30°. The input link is extended beyond joint B and an input force (Fin) is applied at the end of it, while an output force is drawn from the midpoint of the output link. If an output force of 30 N is desired from an input force of 10 N, how far the input link should be extended, i.e., what is the distance from point B to the point where Fin is applied. Fin B out undefined 02 04 A. Non-scaled diagram; AB = 10, CD=r4 = 30 (output), all in mmarrow_forward
- For the walking-beam mechanism of Figure P4-9, calculate and plot the xand y components of the position of the coupler point P for one complete revolution of the crank O2A. Hint: Calculate them first with respect to the ground link O204 and then transform them into the global XY coordinate system (i.e., horizontal and vertical in the figure). Scale the figure for any additional information neededarrow_forwardThe number of degrees of freedom of the linkage shown in the figure.arrow_forwardThe kinematic scheme of the mechanism is given. Point C is the center of curvature of the link 3 at the point of the contact. Link 2 is with circular shape with center point B. Find the degrees of freedom.arrow_forward
- Study the double slider crank mechanism in figure A: (a) Using Aronhold Kennedy Theory formula, find the number of Instantaneous Centers (b) Using a tabular method, list all instantaneous centers (c) Base on the figure A, locate all the instantaneous centers. (Use solidworks to show the solution or a drawing solution.)arrow_forwardQestion-1: A slider-crank mechanism is shown in figure below. Position vectors for various linkages are drawn as shown in figure. Length of the rotating Link-1 (L1) is continuously changing due to the slider placed on it. Link-3 is fixed and aligned along y-axis. Note: All angles are measured anti-clockwise from x-axis and Link-1 is rotating with uniform velocity Take: L2 = 20mm, 02 =45°, L3= 30mm, o=10rad/sec, V2= 1000mm/s. a) Formulate the vector loop, position, velocity and acceleration equations b) Solve to find 01, L1, linear velocity of slider and angular acceleration of link-1. c) Identify if the mechanism can be declared as spatial or planar mechanism also identify total number of full and half joints.arrow_forwardProblem 2 The linkage in Figure P7-5b has o4A = o2A = 0.75, AB = 1.5, and AC = 1.2 in. The effective crank angle in the position shown is 77° and angle BAC = 30°. Find a3, AA, AB, Ac for the position shown for w2 = 15 rad/sec and a2 = 10 rad/sec^2 in the directions shown using an analytic method. (Hint: Create an effective linkage for the position shown and analyze it as a pin-jointed fourbar.) the linkage has a parallelogram form Assume rolling contactarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY
Differences between Temporary Joining and Permanent Joining.; Author: Academic Gain Tutorials;https://www.youtube.com/watch?v=PTr8QZhgXyg;License: Standard Youtube License