Concept explainers
Videos
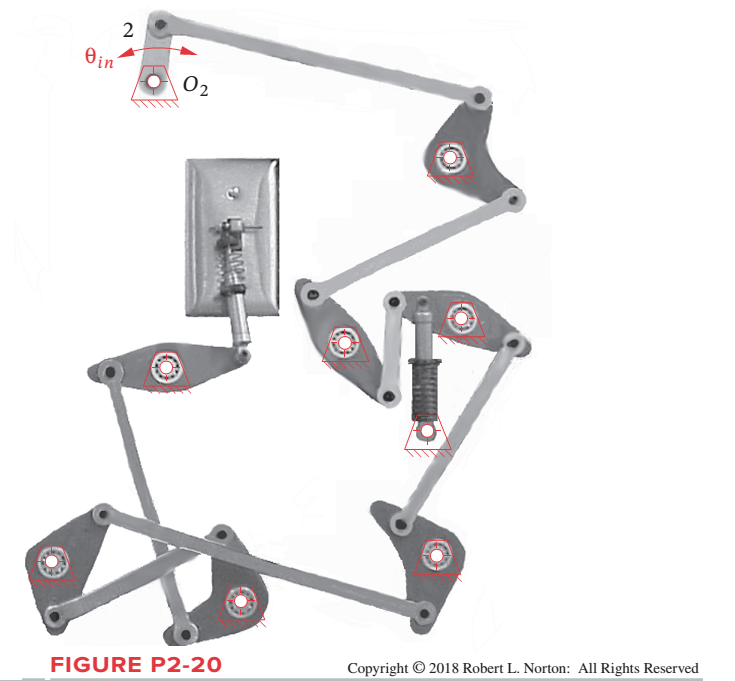
Figure P2-20 shows a “Rube Goldberg”
Want to see the full answer?
Check out a sample textbook solution
Chapter 2 Solutions
Loose Leaf For Design Of Machinery (mcgraw-hill Series In Mechanical Engineering)


- Get the degree of freedom of the following mechanism. Pin in Siot ofarrow_forwardConsider the Four-Degree-of-Freedom robot shown in figure Q1, and usethe following hints in your answer:Hint 1- Use frames {OO}, {O1} and {O4} as indicated in figure Q1.Hint 2- A joint can undergo a twist and a rotation at the same timearrow_forwardQ1: For a four-bar linkage. If a=5.5m, b=6m, c=8m and d=D10m. 1: Find the minimum of the transmission angle in degrees 2: Find the maximum of the transmission angle in degrees 3: Find 0, at the toggle positions in degrees bolaarrow_forward
- Q1/ Number the links on two of the mechanisms shown in Figures (1 & 2 & 3 & 4 & 5) then, calculate the number of degrees of freedom. FIG. 1 FIG. 1 FIG. 2 FIG. 1 FIG. 3 Bo 16arrow_forwardThe reversing motor,which is controlled by two power relays,can be rotated in both directions as shown in the figure beiow.When the motor is mechanically combined with a lead screw,the rotary motion is converted to a linear one,such as the one moving lef tor right on the worktable in the layout.The desired direction of rotation is selected via the two STAFIT buttons,respectively.The limit switches LS1 and LS2,located at the two extreme motion limits,ensure 1-rqtf we forget to stop the movement of the worktable,then it will stop automatically, and the mechanism of the layout will not be destroyed.Draw the circuit of automation.arrow_forwardFind the degrees of freedom of the mechanism in the figure.arrow_forward
- Write and draw the following grashof's criterion and kind of grashof's four-bar mechanism such as; 1. Crank-rocker mechanism; 2. Drag link mechanism; 3. Double rocker mechanism; 4. Crossover-position or charge-point mechanism; 5 Triple rocker mechanism (non-grashof). Use technical Pen for the following: 0.2(light -for linkages and hand writing), 0.4(medium - for joints), 0.6(heavy - for fixed link or frames) use 2-4-4 template, all caps, italicized.arrow_forwardThe number of degrees of freedom of the linkage shown in the figure.arrow_forwardDOF for the following mechanism is .3 2arrow_forward
- Draw the kinematic diagram of the following mechanism by labelling the links and the joints and calculate its mobility / DOF.arrow_forwardThe kinematic scheme of the mechanism is given. Point C is the center of curvature of the link 3 at the point of the contact. Link 2 is with circular shape with center point B. Find the degrees of freedom.arrow_forwardCalculate the Degree of Freedom (DOF) of the following mechanism.arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY