Concept explainers
Videos
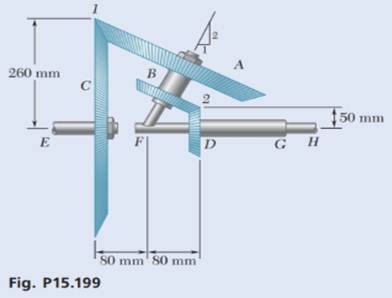
In Prob. 15.199, determine (a) the common angular acceleration of gears A and B, (b) the acceleration of the tooth of gear A that is in contact with gear C at point 1.
(a)
The common angular acceleration of the gears
Answer to Problem 15.200P
The common angular acceleration of the gears
Explanation of Solution
Given Information:
The angular velocity of the gear
Draw the schematic diagram of the given system.
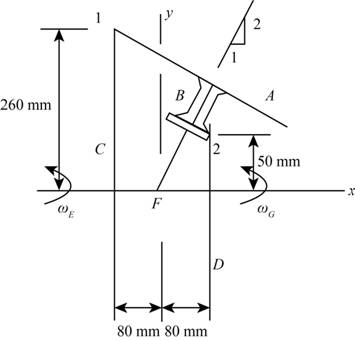
Figure-(1)
Write the expression for the velocity of point 1.
Here, the angular velocity of the gear
Write the expression for the velocity of point 1 when gear
Here, the angular velocity of the shaft unit carries gear
Write the expression for the velocity of point 2.
Here, the angular velocity of the gear
Write the expression for the velocity of point 2 when gear
Write the expression for the angular velocity of the inclined shaft unit which carries gear
Here, the angular velocity of the shaft in x- direction is
Draw the diagram to show the motion of the shaft is
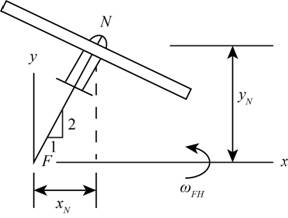
Figure-(2)
Write the expression for the velocity of point
Here, the position vector at point
Write the expression for the velocity at point
Here, the angular velocity of shaft
Write the expression for the common angular acceleration of the gear
Calculation:
Consider the unit vector along
From Figure-(1) the coordinate of the point 1 at the intersection of the gears
From Figure-(1) the coordinate of the point 2 at the intersection of the gears
Since, the shaft
Substitute
Substitute
Substitute
Compare the terms along the x- direction in Equation (X).
Compare the terms along the z- direction in Equation (X).
Since, the shaft
Substitute
Substitute
Substitute
Compare the terms along the z- direction in Equation (X).
Substitute
Substitute
Substitute
From Figure-(2) the coordinate of the point
Substitute
Substitute
Substitute
Substitute
Conclusion:
The common angular acceleration of the gear
(b)
The acceleration of the tooth of the gear
Answer to Problem 15.200P
The acceleration of the tooth of the gear
Explanation of Solution
Write the expression for the acceleration of the gear
Calculation:
Substitute
Conclusion:
The acceleration of the tooth of the gear
Want to see more full solutions like this?
Chapter 15 Solutions
Vector Mechanics for Engineers: Dynamics


- Question No. 18: (a) In an epicyclic gear train, an arm carries two gears A and B having 36 and 45 teeth respectively. If the arm rotates at 150 r.p.m in the anticlockwise direction about the centre of the gear A which is fixed, determine the speed of gear B. If the gear A instead of being fixed, makes 300 r.p.m in the clockwise direction, what will be the speed of gear B? (b) Prove that the resultant unbalanced force is minimum when half of the reciprocating masses are balanced by rotating masses.arrow_forwardThe outer gear A rotates with an angular velocity of 6 rad/s counterclockwise. Knowing that the angular velocity of the intermediate gear B is 9 rad/s clockwise, determine: 1. The angular velocity of the arm ABC 2. The angular velocity of the outer gear C. ,5 in. 10 in. 15 in. 15 in.-arrow_forwardThe outer gear A rotates with an angular velocity of 2 rad/s counterclockwise. Knowing that the angular velocity of the intermediate gear B is 4 rad/s clockwise, determine: 1. The angular velocity of the arm ABC 2. The angular velocity of the outer gear C. 5 in. 10 in. B 15 in. 15 in.arrow_forward
- ▸ 17.9 Each of the gears A and B has a weight of 5 lb and a radius of gyration of 4 in., while gear C has a weight of 25 lb and a radius of gyration of 7.5 in. A couple M of magnitude 6.75 lb ft is applied to gear C. Deter- mine (a) the number of revolutions of gear C required for its angular veloc- ity to increase from 100 to 450 rpm, (b) the corresponding tangential force acting on gear A. 4 in 10 in Fig. P17.9arrow_forwardThe outer gear A rotates with an angular velocity of 9 rad/s counterclockwise. Knowing that the angular velocity of the intermediate gear B is 6 rad/s clockwise, determine: 1. The angular velocity of the arm ABC ut of 2. The angular velocity of the outer gear C. ,5 in. 10 in. B 15 in. 15 in.- Select one: O A. warm =5 rad/s (CWI: and we = 3 rad/s (CW) OB.Wurm=1 rad/s (CW) and we = 0 radis 2Cwn=0 radis and w=1.5 rad/s (CCW)arrow_forwardThe outer gear A rotates with an angular velocity of 3 rad/s counterclockwise. Knowing that the angular velocity of the intermediate gear B is 3 rad/s clockwise, determine: 1. The angular velocity of the arm ABC 2. The angular velocity of the outer gear C. 5 in. 10 in. 15 in. 15 in. Select one: O A.Wa= l rad/s (CW); and we O rad/s E B. warm =0 rad/s; and wc = 1.5 rad/s (CCW) O C.warm =5 rad/s (CW); and wc = 3 rad/s (CW) D:Warm =3 rad/s (CW): and wc =1.5 rad/s (CW). 9:17 PM AGO eA ENG 17-Apr-2021arrow_forward
- 6) Bar BDE is attached to two links AB and CD. Knowing that at the instant shown link AB rotates with a constant angular velocity of 3 rad/s clockwise, determine the acceleration (a) of point D, (b) of point E. 19.1 cm 19.1 cm C -30.5 cm -22.9 cm- B ODarrow_forwardQ3. An epicyclic gear consists of three gears A, B and C as shown in Fig 1. The gear A has 72 internal teeth and gear C has 32 external teeth. The gear B meshes with both A and C and is carried on an arm EF which rotates about the centre of A at 18 r.p.m. If the gear A is fixed, determine the speed of gears B and C. B Fig.1arrow_forwardA gear reduction system consists of three gears A, B, and C. Knowing that gear A rotates clockwise with a constant angular velocity w, = 600 rpm, determine the magnitude of angular velocities of gears B and C. (Answer: @g = 300 rpm, ccw @c = 100 rpm, cw ) 2 in. 2 in. 4 in. 6 in.arrow_forward
- Problem (8) The belt shown moves over two pulleys without slipping. At the instant shown the pulleys are rotating clockwise and the speed of point B on the belt is 4 m/s, increasing at the rate of 32 m/s?. Determine, at this instant, (a) the angular velocity and angular acceleration of each pulley, (b) the acceleration of point P on pulley C. B 160 mm fi00 mmarrow_forward0.2 m 0.25 m D E 0.6 m- Knowing that at the instant shown the angular velocity of rod AB is 15 rad/s clockwise, determine (a) the angular velocity of rod BD. (b) the velocity of the midpoint of rod BD. In the position shown, bar AB has an angular velocity of 4 rad/s clockwise. Determine the angular velocity of bars BD and DE. 200 mm 75 mm D 175 mm - 100 mm Earrow_forward2. An overhead door is guided by wheels at A and B that roll in horizontal and vertical tracks. Knowing that when 0 = 40° the velocity of wheel B is 1.5 ft/s upward, determine (a) the angular velocity of the door, (b) the velocity of end D of the door. 5ft 5 ftarrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY