
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
thumb_up100%
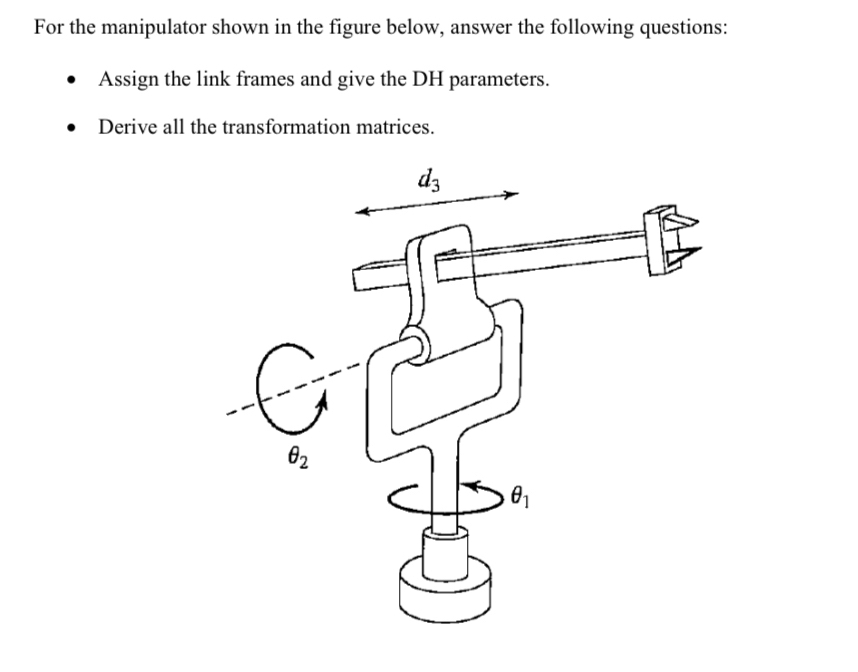

Transcribed Image Text:For the manipulator shown in the figure below, answer the following questions:
Assign the link frames and give the DH parameters.
Derive all the transformation matrices.
dz
02
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution

Trending nowThis is a popular solution!

Step by stepSolved in 2 steps with 1 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Write trigonometric relations or circuit equations for the stepwise solution method. Obtain the velocity equations by taking the time derivatives of the position equations. Obtain the acceleration equations by taking the time derivatives of the velocity equations.arrow_forwardپشم را 2 Pk k Düngür 3 F4 Lo S Find the face FL that develops in the system. Show derivation (using matrix analysis) in a step-by-step fashion.arrow_forwardPleasearrow_forward
- 5.Design a system to measure the bending moment (up and down) and torque in the tail boom of the human-powered aircraft shown below. You will need two Wheatstone bridges. Your system should measure the bending and torque independently, but not be sensitive to any other internal forces, like axial force, transverse shear, or bending moment about the vertical axis (back and forth). (If relevant) A clearly labeled diagram (or diagrams) about your analysis with a coordinate system and relevant labels. Final answer with appropriate units and significant figures. You can use the fprintf() command in MATLAB to format numerical results A 2-3 sentence reflection on your answer. Does it make sense? Why or why not? What are some implications? (a) Make a few clear, labeled sketches showing approximately where you would place the strain gauges. Consider the location (along the length of the boom), positioning (around the circumference of the boom), and orientation of the gauges. Show clearly…arrow_forwardProblem 3: The RPH robot of Figure 3 is shown in its zero position. Determine the end- effector zero position configuration M, and the screw axes S; in {s}. n. F -inta. Sorowo- Zs {s} Xs L₁ ŷs Lo 0₁5 L2 02 {b} zb 103 pitch h = 0.1 m/rad Ấb ŷb L3 Figure 3: An RPH open chain shown at its zero position. All arrows along/about the joint axes are drawn in the positive direction (i.e., in the direction of increasing joint value). The pitch of the screw joint is 0.1 m/rad, i.e., it advances linearly by 0.1 m for every radian rotated. The link lengths are Lo = 4, L₁= 3, L2= 2, and L3= 1 (figure not drawn to scale).arrow_forwardQ4arrow_forward
- Please solve 509 and 510, thanks!arrow_forwardFind the transformation matrix for the following transformations: 1) Rotate 45° about Xo-axis. (Xo, Yo, Zo) → (X₁, Y₁, Z₁); 2) Followed by a rotation of 90° about Xo-axis. (X₁, Y₁, Z₁)→ (X₂, Y₂, Z₂); 3) Followed by a rotation of 60° about Y₂-axis. (X₂, X2, Z2)→ (X3, Y, Z3); 4) Followed by a rotation of 60° about Z₂-axis. (X3, Y3, Z3) → (X, Y4, Z4). Note: give final answer in matrix multiplication form, no need to write out the elements of the matrices or multiply the matrices out. URALLY AND AFICIALLY LGarrow_forwardAll pertinent rigid dimensions are specified for the linkage shown. Note that the ground pivot for the input link is at the origin of the coordinate system. The input angle []in is currently 170° measured from the x axis as shown. The figure is not exactly to scale, but it is reasonably close for checking purposes. (a) Calculate the value of the angle []out as shown on the figure. Use the equations developed from the loop closure method. Note that you will need to incorporate a change of coordinate axes orientation to the axes defined for the loop closure equations. (b) Calculate the absolute location of point P with respect to the coordinate axes shown. 18 30° 9° 9 P 20 50° -170° Xarrow_forward
- Position Analysis of the crank-slider linkage. The link length and offset for a fourbar slider-crank linkage are: link 2= 3.5, link3= 10, offset=1. Find both open and crossed solutions for angle theta3 and slider position, d, as driver makes a complete revolution.construct graphs to describe how the slider and theta3 varies as theta2 makes the entire revolution.arrow_forwardCreate a Kinematic Diagram of the following RLR or RPR robotic arm. Show coordinate, and link length and proper orientation following the Denavit-Hartenberg frame method. Place you into the above box.arrow_forwardwriting in paper pleasearrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY