
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Question
thumb_up100%
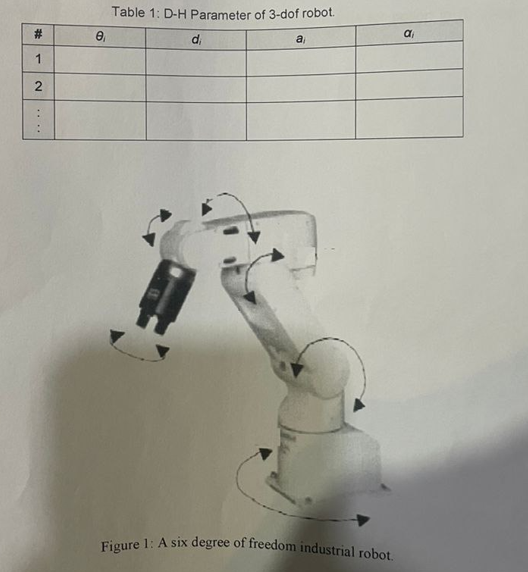
Figure 1 shows a six degree of freedom industrial robot.
i. Construct the coordinates frames based on the D-H representations.
ii. Complete the D-H parameter as illustrated in Table 1.

Transcribed Image Text:#
1
2
:
Ф
Table 1: D-H Parameter of 3-dof robot.
d₁
a
α
Figure 1: A six degree of freedom industrial robot.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 1 steps with 3 images

Knowledge Booster

Similar questions
- For the mechanism shown below, use the graphical position analysis to specify the value(s) of 02 when the linear speed of link 6 is zero. The parameters of each link length is: L2 = 3 cm, L3 =10 cm (O₂B), L5 = 4 cm, L σ₂³ = 5 cm. ////////////////// 5 B 4 0₂ 2 3 A₂ on 2 and 4 A3 on 3 10.5 cmarrow_forward23. The programmer used three-point method to set up an accurate UF[3] on the part reference surface by sequentially recording points 1, 2, and 3 that are specified on the part reference surface for the three-points method in the robot system. If the programmer recorded three points used by the three-point method in the sequence of points 1, 3, 2 rather than point 1, 2, 3, then (a) the direction of x-axis is not changed (b) the direction of z-axis of UF[3] is changed (c) UF[3] setup is not accurate relative to the part reference surface (d) the origin of UF[3] is changed 24. The programmer preciously recorded all robot points P[n] for a robot task program. However, it is found that during the execution of the robot program, the robot TCP can't always precisely reach to each recorded point. Which of the following statements is correct: (a) The robot has poor accuracy (b) the robot has poor repeatabilityarrow_forwardCAMarrow_forward
- The vector expressions for the position vectors for cables “AC” and “AD” are given by: rAC = -3i - j - 6k ft and rAD = 2i + 3j - 6k ft respectively. What is the length of cable “AD”?arrow_forwardFor the two link manipulator shown below, the force acting on the origin of frame 2 is: F=f, f$ O Save X, L2 X, L, , Z2 *Zo,1 O [fi cos®2] Lf; sind2 O [ facos01 fysind1 fx O [ fa sind2 [ fycos02arrow_forwardWhich datum has size? Please refer to image attached.arrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY