
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
1-draw velocity
and C.
2-Label The IC of Velcoity, If it does not exsist mention why
3- What type of motion is each link experiencing at this instant? Rotation about a
fixed axis, Pure Translation, or General Planar motion? and why (justify your answer )
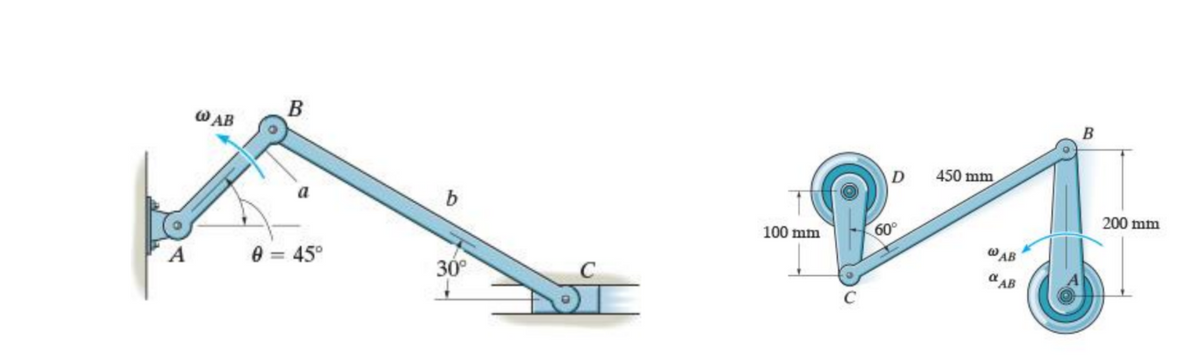

Transcribed Image Text:B
W AB
В
450 mm
b
200 mm
100 mm
60°
WAB
A
e = 45°
30°
AB
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 1 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- can you pls provide the wxcat solution for quation of motion with complete explaition by hand written notesarrow_forwardPosition Analysis of the crank-slider linkage. The link length and offset for a fourbar slider-crank linkage are: link 2= 3.5, link3= 10, offset=1. Find both open and crossed solutions for angle theta3 and slider position, d, as driver makes a complete revolution.construct graphs to describe how the slider and theta3 varies as theta2 makes the entire revolution.arrow_forward(Robotics D-H representation question) Full working needed for the question in the image, thank you!arrow_forward
- Consider two robot-manipulators:• A SCARA robot with joints displacement range q1,2 = −90◦...90◦ and q3 = 0..10cm and links lengths L1,2=10 cm.• A Cartesian robot with joint displacements’ range q1,2,3 = 0..10 cm.Which statement is correct?1) The Cartesian robot has a larger workspace.2) It is not possible to judge the workspace based on the information provided.3) Both robots have revolute joints.4) The SCARA robot has a larger workspace.arrow_forwardThe figure shows a linkage in one position. What is the instantaneous acceleration of point Pif the link O₂A is rotating CW at 40 rad/sec? 4/5 44 201 0₂ Show Transcribed Text MULTIPLE CHOICE a. 8000 in/sec^2 b. 23,073 in/sec^2 c. 15,282 in/sec^2 d. 9,005.8 in/sec^2arrow_forwardFor the mechanism shown below, use the graphical position analysis to specify the value(s) of 02 when the linear speed of link 6 is zero. The parameters of each link length is: L2 = 3 cm, L3 =10 cm (O₂B), L5 = 4 cm, L σ₂³ = 5 cm. ////////////////// 5 B 4 0₂ 2 3 A₂ on 2 and 4 A3 on 3 10.5 cmarrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY