
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
(Robotics D-H representation question) Full working needed for the question in the image, thank you!

Transcribed Image Text:Q1.
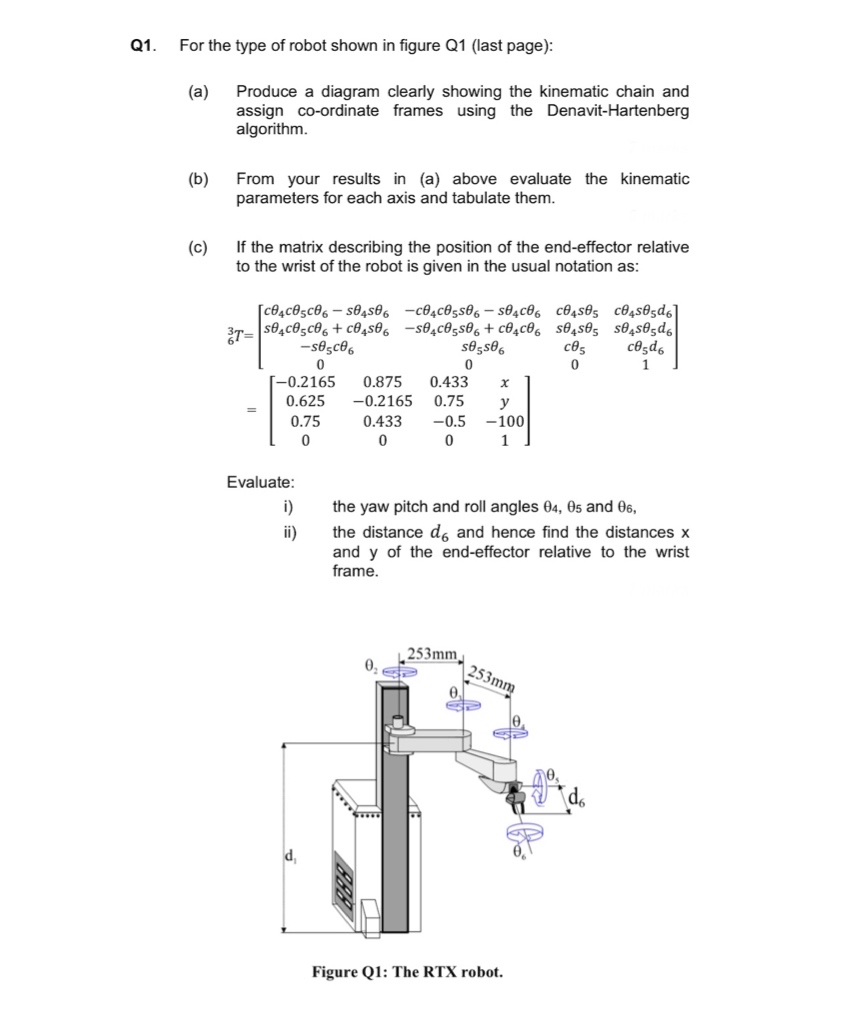
For the type of robot shown in figure Q1 (last page):
(a)
(b)
(c)
Produce a diagram clearly showing the kinematic chain and
assign co-ordinate frames using the Denavit-Hartenberg
algorithm.
From your results in (a) above evaluate the kinematic
parameters for each axis and tabulate them.
If the matrix describing the position of the end-effector relative
to the wrist of the robot is given in the usual notation as:
3T=
[c04c05c06-504506-c04c05506-504C06 C04505 C04505d6
s04c05c06+c04506-504c05506 + c04c06 S0450₁ S04505d
S85506
c85
c05d6
1
0
0
[-0.2165 0.875 0.433
0.625 -0.2165
0.75
0.433
0.75
0
0
Evaluate:
i)
ii)
-s05c06
0
d₁
-0.5
0
the yaw pitch and roll angles 04, 05 and 06,
the distance de and hence find the distances x
and y of the end-effector relative to the wrist
frame.
253mm
X
y
-100
1
253mm
0.
CP
Figure Q1: The RTX robot.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 4 steps with 2 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- please answer do not image formatarrow_forwardI was given a practice question for transforming equation. In the image I will have a slide the lecture note of an example of it being done but I do not understand what was done exactly. Please explain how to answer the question. Thank youarrow_forwardhow do I dimension the object shown below assume grid spacing is 0.2arrow_forward
- The title of our study is "Design and Fabrication of an Agricultural Spraying Attachment for an Autonomous Rover" we need help in the machine design part of our study, specifically Pump selection, battery selection, and center of gravity computation Rover weight capacity 35 kilo grams (payload) Rover measurements: Wheel distance - 14.5 inches and 8.5 inches Rover platform size (width & length) 14.4 inches x 10.4 inches Height- 15.8 inchesarrow_forwardwhat is the seven step logical diadnostic?arrow_forwardTechnical graphics are the preferred method for communicating designs during a design process. True Falsearrow_forward
- What is the difference between OrCad and Comsol multiphysicsarrow_forwardDon't use chatgpt will upvotearrow_forwardYour capstone design team is prototyping (e.g. you are building a model to test not a final product) a "fire identification drone. The final product is intended to fly over rugged wilderness areas and look for small fires that should be monitored and potentially fought or contained. It is NOT intended to be used in large active fires. Your subteam's job is to design and build the support frame for the drone (e.g. the structure where the motors, propellers, guidance electronics and GPS, heat sensors, radio receiver and transmitter, etc. are attached) for the prototype. You have access to a machine shop with saws, lathes (for removing material by rotating it and using a cutting tool), drills and a facility with 3-D printers that can print a variety of plastics using fused deposition modeling (this is the technique where a polymer filament is melted and forced through a nozzle to build a structure layer by layer). You will be testing in a summer/fall timeframe so you expect temperatures…arrow_forward
- explain the Static here? include the minimum and the max .arrow_forwardThis problem comes from Introduction to Graphics Communications for Engineers 4th Edition page 64 #8 could you help me sketch the isometric view given the 3 standard viewsarrow_forwardHow do you interpret a continuously rising or falling angular position output in Simulinkarrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY