
Precision Machining Technology
3rd Edition
ISBN: 9781337795302
Author: Peter, Hoffman.
Publisher: Cengage Learning,
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
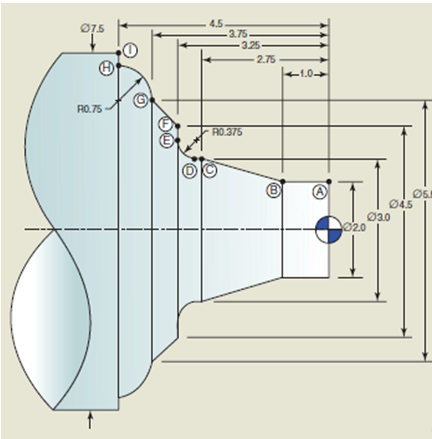
Chapter 8.3, Problem 1RQ
Write the X- and Z-axis coordinates for the part show n. Use the diametral method in the X-axis.
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
In your Cartesian plane find and connect the following points:
In the figure, a cube of edge length a-3.10m sits with one corner at the origin of an xyz coordinate system. A body diagonal is a line.
that extends from one corner to another through the center. Find the angle between each pair of body diagonals
a. What is the position vector that starts at -50j and ends at 50 j?
b. What is the position vector that starts at (-50 i - 20 j +10 k) lb and ends at (50 i + 20 j -10 k) lb
c. What is the resultant sum of the moments in Cartesian vector form? Round your entries to the nearest whole number.
Chapter 8 Solutions
Precision Machining Technology
Ch. 8.1 - What is an ATC?Ch. 8.1 - What is an MCU and what is its function?Ch. 8.1 - Briefly describe a ball screw and a linear guide.Ch. 8.1 - Explain the benefits of using the absolute...Ch. 8.1 - Explain the benefits of using the incremental...Ch. 8.1 - Which coordinate system uses an angle and a...Ch. 8.1 - What is the name for the type of motor used to...Ch. 8.1 - Supposing a programmer, using absolute mode,...Ch. 8.1 - What is a modal code?Ch. 8.1 - What is another name for the Cartesian coordinate...
Ch. 8.1 - List four G-codes and describe their functions. a....Ch. 8.1 - List four M-codes and describe their functions. a....Ch. 8.1 - What is the name of the character that ends each...Ch. 8.1 - Explain the purpose of the safe-start portion of a...Ch. 8.2 - Name the two primary machine axes on most CNC...Ch. 8.2 - Explain the difference between a turning center...Ch. 8.2 - List the three common types of live toolholders....Ch. 8.2 - Name three major collet styles used in...Ch. 8.2 - Name three types of workholding devices for...Ch. 8.2 - Name three major styles of turning machines....Ch. 8.2 - Explain why some workholding devices can be run at...Ch. 8.2 - Explain the difference between an OD grooving tool...Ch. 8.2 - When machining workpieces made from bar stock,...Ch. 8.2 - Describe how a sub-spindle can be used to increase...Ch. 8.2 - How does a Swiss turning center differ from a...Ch. 8.3 - Write the X- and Z-axis coordinates for the part...Ch. 8.3 - To perform a facing cut using a tool with a nose...Ch. 8.3 - Explain the difference between rigid tapping and...Ch. 8.3 - How must the feed rate for tapping using a...Ch. 8.3 - Describe what happens to a concave radius (fillet)...Ch. 8.3 - Describe what happens to an outside chamfer when...Ch. 8.3 - If a G1 code command is programmed partway through...Ch. 8.3 - List and briefly describe the two methods for...Ch. 8.3 - Explain in your own words the difference between...Ch. 8.3 - In your own words, describe a canned cycle.Ch. 8.3 - List two types of canned cycles besides roughing...Ch. 8.4 - What machine mode is generally used to manually...Ch. 8.4 - MDI stands for _________ ___________ ________.Ch. 8.4 - Which must be set first, the tool geometry offset...Ch. 8.4 - What is the process called where a program is sent...Ch. 8.4 - Explain the purpose of homing.Ch. 8.4 - What is the process called when a new program is...Ch. 8.4 - When setting up a machine to run a program that...Ch. 8.4 - What does MCS stand for?Ch. 8.4 - What is used to adjust the clamping pressure of...Ch. 8.4 - What does MCS stand for?Ch. 8.4 - What does WCS stand for?Ch. 8.4 - A workpiece offset is the distance from __________...Ch. 8.5 - Explain the difference between a machining center...Ch. 8.5 - Name the two major types of ATCs and briefly...Ch. 8.5 - What are the two basic types of tapping...Ch. 8.5 - What are the three most common styles of collets...Ch. 8.5 - What are the two basic types of tapping...Ch. 8.5 - Prob. 6RQCh. 8.5 - A programmable indexing fixture creates a fourth...Ch. 8.5 - A _______ ________ uses interchangeable tooling...Ch. 8.5 - Briefly describe a tombstone used for CNC...Ch. 8.5 - A custom ______ can be designed and built to hold...Ch. 8.5 - The combination of the machining operations...Ch. 8.6 - What are the three major axes used during CNC mill...Ch. 8.6 - What command would be given to turn on the spindle...Ch. 8.6 - What G-code designates IPM feed rate mode? IPR...Ch. 8.6 - What is the purpose of a clearance plane in CNC...Ch. 8.6 - What is the purpose of work coordinate systems?Ch. 8.6 - Briefly define linear interpolation.Ch. 8.6 - If during the last operation on a part, a G1 code...Ch. 8.6 - Briefly describe the use of I and J for the arc...Ch. 8.6 - Write two blocks of code that could be used to...Ch. 8.6 - Briefly explain the difference between rigid and...Ch. 8.6 - Define the initial plane for a canned drilling or...Ch. 8.6 - A G98 in a canned cycle sets the return point to...Ch. 8.6 - A _____ code is used to cancel a canned cycle.Ch. 8.6 - What two codes are used to activate automatic...Ch. 8.6 - What two codes are used to activate automatic...Ch. 8.6 - What code is used to cancel automatic cutter...Ch. 8.7 - Which must be set first, a work offset or a tool...Ch. 8.7 - What mode is used to manually enter programs into...Ch. 8.7 - What is the process called when a program is sent...Ch. 8.7 - Explain what may occur that makes it necessary to...Ch. 8.7 - Explain the purpose of homing.Ch. 8.7 - What is the process called when a new program is...Ch. 8.7 - What are two actions that can be taken during the...Ch. 8.7 - When automatic cutter radius compensation is used...Ch. 8.7 - Which machine mode allows short, temporary program...Ch. 8.7 - Which machine mode is used to run the machine...Ch. 8.7 - What are the two controls on the machine's control...Ch. 8.7 - What control panel feature can be used to slow a...Ch. 8.8 - Prob. 1RQCh. 8.8 - Prob. 2RQCh. 8.8 - What are the three primary steps in creating a CNC...Ch. 8.8 - Prob. 4RQCh. 8.8 - What is the definition of entity?Ch. 8.8 - Why should a toolpath be verified on the screen of...Ch. 8.8 - What is a post-processor used for?Ch. 8.8 - What is it called when mutiple touching entities...Ch. 8.8 - What type of cutting tool is usually used for...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Eight points in the cartesian system are as follow: A(-9, 3), B(-5, 6), C(2, 2), D(5, 6), E(-2, -5), F(-8, 0), G(2, -3), H(9, -3) Draw and label the vectors on a graph. For each vector, determine the components of the related position vector. Determine the magnitude of each vector. Determine the direction of each vector with a horizontal line, and bearing angle....arrow_forwardA point P is located at (0 0 100) in a body coordinate frame. If the rigid body rotates 60deg about the global X-axis and the origin of the body translates to (X, Y, Z)=(500, 0 600), find the final position (X2, Y2, Z2) in the Global frame by using 4X4 matrix.arrow_forwardCompute F(s) = and polar form. s(s+2) (s+1)(s+10) strikt when s=2-3j. Express the result both in Cartesian coordinate GLG KEEP KIDSarrow_forward
- Given that P=120lb and Q=130lb, find the rectangular representation of P+Q.arrow_forwardCan you solve for the x and y axis given in the question?arrow_forwardIn a design, a line is constructed by connecting PO(2,2,2) and P1(6,6,11), and point P2(2,3,13) is defined. If point P2 is rotated about the axis POP1 anti clockwise by 60 degrees. Find the coordinate of the point P2 at the new location and verify your result by using SolidWorks. X Xp Z Z₂ 0 P P₂ Y₁ 5 P₁arrow_forward
- Let R correspond to a right-hand rotation of angle about the x3-axis. (a)Find the matrix of R². (b)Show that R² corresponds to a rotation of angle 20 about the same axis. (c)Find the matrix of R" for any integer n.arrow_forwardDetermine the rotation matrix for the following rotation of 900 about X axis rotation of 900 about Y axis, rotation of 450 about Z axisarrow_forwardSolve this ASAP show that the cylindrical co-ordinate are generalized co-ordinates.arrow_forward
- Based on the figure identify only the relative polar coordinate of each point. The answer would be in (x<degree form)arrow_forwardQ4: Write down the absolute and incremental X and Y coordinates of the points shown in below figure A+Y PT7 PT4 PTS PT6 -X (0,0) +X PT8 PT3 PT2 Y-Yarrow_forward1. Find F1-2 for the configuration shown where I and 2 are square areas. Reading the book may be very helpful here.arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Precision Machining Technology (MindTap Course Li...Mechanical EngineeringISBN:9781285444543Author:Peter J. Hoffman, Eric S. Hopewell, Brian JanesPublisher:Cengage Learning
Precision Machining Technology (MindTap Course Li...Mechanical EngineeringISBN:9781285444543Author:Peter J. Hoffman, Eric S. Hopewell, Brian JanesPublisher:Cengage Learning International Edition---engineering Mechanics: St...Mechanical EngineeringISBN:9781305501607Author:Andrew Pytel And Jaan KiusalaasPublisher:CENGAGE L
International Edition---engineering Mechanics: St...Mechanical EngineeringISBN:9781305501607Author:Andrew Pytel And Jaan KiusalaasPublisher:CENGAGE L
Precision Machining Technology (MindTap Course Li...
Mechanical Engineering
ISBN:9781285444543
Author:Peter J. Hoffman, Eric S. Hopewell, Brian Janes
Publisher:Cengage Learning
International Edition---engineering Mechanics: St...
Mechanical Engineering
ISBN:9781305501607
Author:Andrew Pytel And Jaan Kiusalaas
Publisher:CENGAGE L
Introduction To Engineering Drawing; Author: EzEd Channel;https://www.youtube.com/watch?v=z4xZmBpXIzQ;License: Standard youtube license