
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Question
I need to adapt a real-life system to this assignment. It doesn't need to be a very complicated system.
I am a senior mechanical engineering student. I need help with my mechanical theory homework
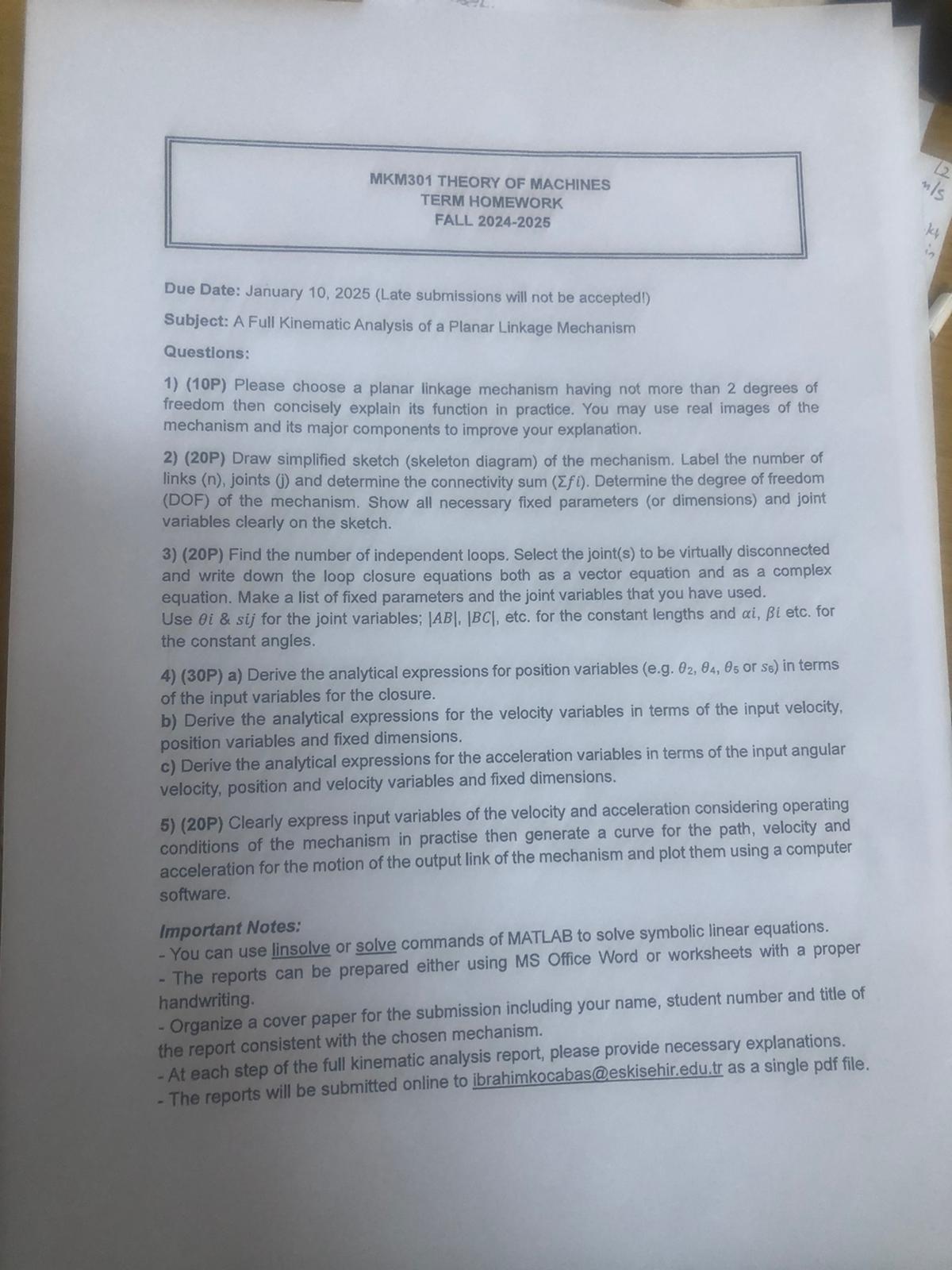

Transcribed Image Text:MKM301 THEORY OF MACHINES
TERM HOMEWORK
FALL 2024-2025
12
m/s
ky
Due Date: January 10, 2025 (Late submissions will not be accepted!)
Subject: A Full Kinematic Analysis of a Planar Linkage Mechanism
Questions:
1) (10P) Please choose a planar linkage mechanism having not more than 2 degrees of
freedom then concisely explain its function in practice. You may use real images of the
mechanism and its major components to improve your explanation.
2) (20P) Draw simplified sketch (skeleton diagram) of the mechanism. Label the number of
links (n), joints (j) and determine the connectivity sum (Σfi). Determine the degree of freedom
(DOF) of the mechanism. Show all necessary fixed parameters (or dimensions) and joint
variables clearly on the sketch.
3) (20P) Find the number of independent loops. Select the joint(s) to be virtually disconnected
and write down the loop closure equations both as a vector equation and as a complex
equation. Make a list of fixed parameters and the joint variables that you have used.
Use Oi & sij for the joint variables; |AB|, |BCI, etc. for the constant lengths and ai, ẞi etc. for
the constant angles.
4) (30P) a) Derive the analytical expressions for position variables (e.g. 02, 04, 05 or s6) in terms
of the input variables for the closure.
b) Derive the analytical expressions for the velocity variables in terms of the input velocity,
position variables and fixed dimensions.
c) Derive the analytical expressions for the acceleration variables in terms of the input angular
velocity, position and velocity variables and fixed dimensions.
5) (20P) Clearly express input variables of the velocity and acceleration considering operating
conditions of the mechanism in practise then generate a curve for the path, velocity and
acceleration for the motion of the output link of the mechanism and plot them using a computer
software.
Important Notes:
- You can use linsolve or solve commands of MATLAB to solve symbolic linear equations.
The reports can be prepared either using MS Office Word or worksheets with a proper
handwriting.
Organize a cover paper for the submission including your name, student number and title of
the report consistent with the chosen mechanism.
- At each step of the full kinematic analysis report, please provide necessary explanations.
The reports will be submitted online to ibrahimkocabas@eskisehir.edu.tr as a single pdf file.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 5 images

Knowledge Booster

Similar questions
- Please solve the following by hand and without the use of AI. Thank you!arrow_forwardProblem 3 (40 points) (CCOs 1 & 3)/MatlabGrader On Canvas, you will find a Matlab function file process.p that takes as input the variable x and returns as output the result of a complicated process g (x). Copy the file into your working directory and use it as any other Matlab .m file or build-in intrinsic Matlab function (just call it using its name process). The only difference between a .p and a .m file is that the source code of the .p file is not visible. Find all roots of g(x) in the interval 0 ≤ x ≤ 10 to a tolerance in function of at least 10-10 using mySecant from problem 2. Recall that any .m or .p function file can be passed as an argument into another function by prefacing the function name by a @, e.g., @process can be passed as an argument into any Matlab function that uses a function as an input argument, for example fplot(@process,...) for plotting a function. Store all found unique roots in a column vector root, the corresponding tolerances in function in a column…arrow_forwardDefine the following examples as path, motion, or function generation cases:arrow_forward
- I was given a practice question for transforming equation. In the image I will have a slide the lecture note of an example of it being done but I do not understand what was done exactly. Please explain how to answer the question. Thank youarrow_forwardNeed help solving this problem. Please provide clear and concise steps.arrow_forwardINSTRUCTIONS: Solve the following problem by manually applying the finite element method, following these steps: Pre-processing: Geometry identification. Material properties identification. Load identification. Boundary condition identification. Development of the connectivity matrix for nodes and elements. Processing: Calculation of local stiffness matrices. Assembly of the global stiffness matrix. Assembly of the global force matrix (if required). Application of boundary conditions. Resolution of the system of equations. Derivation of the complete displacement vector (u). Post-processing: Reaction forces calculation. Stress analysis. Problem Statement: the truss nodes and elements (in parentheses) are already numbered. The areas (are in cm^2 ) are underlined. members are made of structural steel, modulus of elasticity is (E) of 20×10^6 N/cm^2 . the lengths are given in cm.arrow_forward
- Look up the Arduino Mega 2560. Document the steps how to work with the Arduino in Matlab and Simulink. Make a simulink program turning on the LED on the board for 10sec. Explain your program, comment on your findings and explain how to test it on the actual hardware.arrow_forwardAutoSave STATICS - Protected View• Saved to this PC - O Search (Alt+Q) Off ERIKA JOY DAILEG EJ File Home Insert Draw Design Layout References Mailings Review View Help Acrobat O Comments E Share PROTECTED VIEW Be careful-files from the Internet can contain viruses. Unless you need to edit, it's safer to stay in Protected View. Enable Editing Situation 9 - A 6-m long ladder weighing 600 N is shown in the Figure. It is required to determine the horizontal for P that must be exerted at point C to prevent the ladder from sliding. The coefficient of friction between the ladder and the surface at A and B is 0.20. 25. Determine the reaction at A. 26. Determine the reaction at B. 27. Determine the required force P. 4.5 m 1.5 m H=0.2 30° Page 5 of 5 671 words D. Focus 100% C ЕPIC GAMES ENG 7:24 pm w US 16/02/2022 IZarrow_forward3. As a robotic engineer, your boss needs you to move the gripper on the UGV to the target object. The workspace is shown Figure 1. In order to finish the task, you need to find the correct representation. {b} {c} {e} {s} {d} Figure 1 The Workspace The fixed frame is {s}, a body frame {b} is attached to the chassis of the UGV, a body frame {c} is attached to the gripper, a body frame {d} is attached to the sensor, and a body frame {e} is attached to the target object. The sensor's location is known as Tsd, the chassis of the UGV's location is known as Tsb, the gripper's location's is Tsc, and the target object's location is Tse. The sensor can detect the target object, so the target object can be represented in the sensor's frame. The configuration of the UGV is reported simultaneously, and the gripper's configuration is also known. How to represent the target object in the gripper's frame?arrow_forward
- use LMTD for part a and barrow_forwardpermanent-magnet (pm) genera x Bb Blackboard Learn L STAND-ALONE.mp4 - Google Dri x O Google Drive: ülwgjuó jc lis u O ME526-WindEnergy-L25-Shuja.p x O File | C:/Users/Administrator/Desktop/KFUPM%20Term%232/ME526/ME526-WindEnergy-L25-Shuja.pdf (D Page view A Read aloud T) Add text V Draw Y Highlight O Erase 17 of 26 Wind Farms Consider the arrangement of three wind turbines in the following schematic in which wind turbine C is in the wakes of turbines A and B. Given the following: - Uo = 12 m/s A -XẠC = 500 m -XBC = 200 m - z = 60 m - Zo = 0.3 m U. -r, = 20 m B - CT = 0.88 Compute the total velocity deficit, udef(C) and the velocity at wind turbine C, namely Vc. Activate Windows Go to Settings to activate Windows. Wind Farms (Example Answer) 5:43 PM A 4)) ENG 5/3/2022 I!arrow_forwardPlease solve the following WITHOUT the use of AI. Do not run the prompt through chatgpt. Using MATLAB for the required question, solve the problems. Thank you!arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY