
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
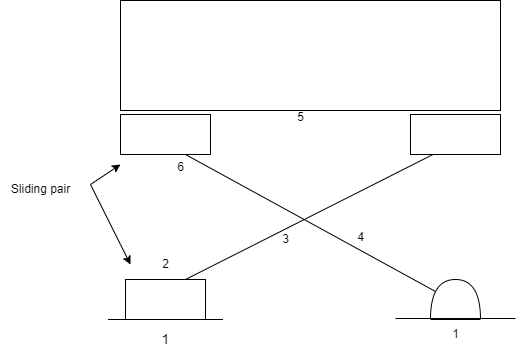
Draw the kinematic digrams of the following
of Freedom (Mobility) of the figure below


Expert Solution
arrow_forward
Step 1: The kinematic diagram for the mechanism is below :
The kinematic diagram is :

Step by stepSolved in 3 steps with 2 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Figure P6-29 shows a drum pedal mechanism. O2A = 100 mm at 162° and rotates to 171° at A°. 0204 = 56 mm, AB = 28 mm, AP = 124 mm, and 04B = 64 mm. The distance from 04 to Fin is 48 mm. Find and plot the mechanical advantage and the velocity ratio of the linkage over its range of motion. If the input velocity Vin is a constant magnitude of 3 m/ see, and Fin is constant at 50 N, find the output velocity and output force over the range of motion and the power in.arrow_forwardConsider that we have a 3-R robot as shown in the figure below. The lengths of the links are: 11-12-13=2. The position and posture of the tool's center point is Pt (x₁, y₁, α), the driving variables are 01, 02, 03, and the output variables are v,v,, w.. (It is in the initial position) yo 1₁ Y₁ 0₁ Y₂ 12 02 X1 -X2 V3 13 P₁ X3 a Xoarrow_forwardParrow_forward
- A DC servomotor drives the y-axis of a NC milling machine table. The motor is coupled to the table lead screw with a gear reduction of 2:1. The lead screw pitch =5 mm/rev. An optical encoder is directly connected to the lead screw. The optical encoder emits 100 pulse/rev. To execute a certain programmed instruction, the table must move from point (25,28)mm to point (155,275)mm in a straight-line trajectory at a feed rate = 200 mm/min. For the y-axis only, determine: (a) rotational speed of the motor, and (c) frequency of the pulse train emitted by the optical encoder at the desired feed ratearrow_forwardFor the 3-DOF Industrial manipulator arm as shown in Figure 1, determine the joint displacements using inverse kinematics approach for known position and orientation of the end of the arm point. The link transformation matrices are given byarrow_forward(i) Determine binary link, ternary link for the given kinematic chain as shown in figure below and also find the number of degrees of freedom by using Kutzbach criteria.arrow_forward
- 2) Block 4 slides in a slot in the fixed piece 1. Axis Q₂ of crank 2 is fixed on 1. Q₂₂A = 1 1/2 in., and AB = 4/1/2 Draw the mechanism, assuming limen- sions for 1, if desired, or use center lines only. Draw the four-bar linkage for this mechanism, properly rotate the linkage Q₂ ABQ400; Name each link, and show the finite and infinite cranks. Frind graphically the two extreme positions of 13, The axis of the pin by which link 3 is attached to the block 4.. Dimension the length of the stroke of B. Ans. 3& in. for scale 1:1arrow_forwardFor the mechanism shown below, use the graphical position analysis to specify the value(s) of 02 when the linear speed of link 6 is zero. The parameters of each link length is: L2 = 3 cm, L3 =10 cm (O₂B), L5 = 4 cm, L σ₂³ = 5 cm. ////////////////// 5 B 4 0₂ 2 3 A₂ on 2 and 4 A3 on 3 10.5 cmarrow_forwardUsing the rule of position analysis pls quickkarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY