
Introductory Circuit Analysis (13th Edition)
13th Edition
ISBN: 9780133923605
Author: Robert L. Boylestad
Publisher: PEARSON
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
Controls of systems problem -
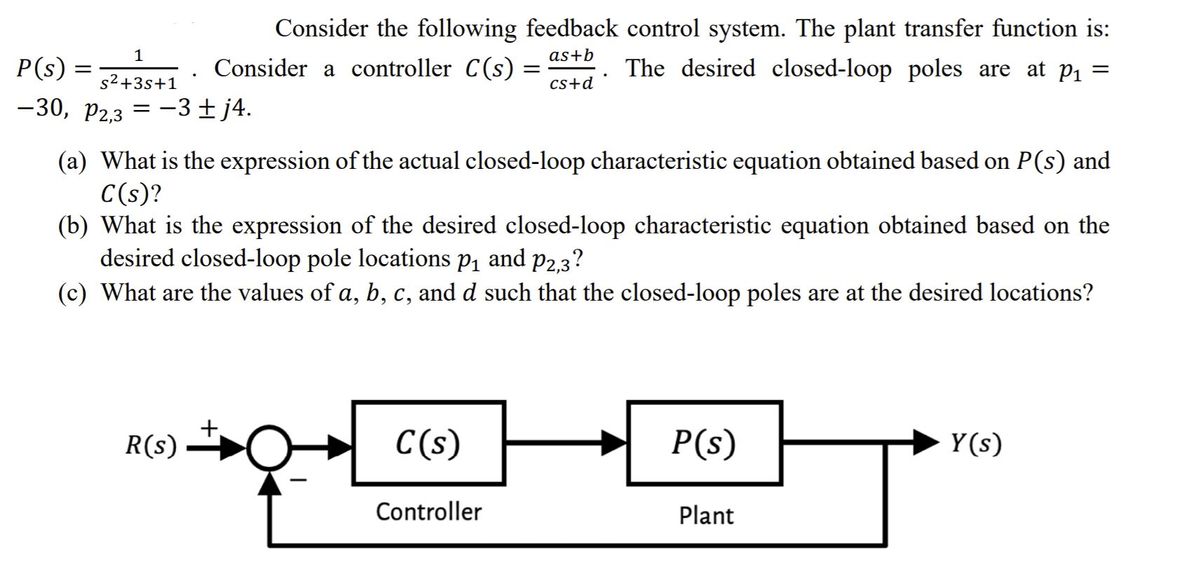

Transcribed Image Text:Consider the following feedback control system. The plant transfer function is:
1
as+b
P(s) =
Consider a controller C(s)
The desired closed-loop poles are at p1 =
s2+3s+1
cs+d
-30, P2.3 = -3±j4.
(a) What is the expression of the actual closed-loop characteristic equation obtained based on P(s) and
C(s)?
(b) What is the expression of the desired closed-loop characteristic equation obtained based on the
desired closed-loop pole locations pį and p2,3?
(c) What are the values of a, b, c, and d such that the closed-loop poles are at the desired locations?
R(s)
C(s)
P(s)
Y(s)
Controller
Plant
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution

Trending nowThis is a popular solution!

Step by stepSolved in 2 steps

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, electrical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Pls solve in detail by hand.arrow_forward6. Consider the feedback system shown in Figure 5. The process transfer function is marginally stable, The controller is the proportional-derivative (PD) controller G,(s) = K, +Kps. Determine if it is possible to find values of K, and K, such that the closed-loop system is stable. If so, obtain values of the controller parameters such that the steady-state tracking error E(s) = R(s)-Y(s) to a unit step input R(s) =1/s is e, = lim e(t) <0.1 and the damping of the closed-loop system is 5=V2/2. Controller Process E,(s) 4 R(s) Kp+Kps Y(s) +4 erwe Figure 5arrow_forwardPlease solve this problem I do not understand If my answer is true, solve it clearly please as my question is clear and plot whatever is needs.arrow_forward
- Electrical Engineering Major. Course: EE350 ( System Dynamics and control ).arrow_forwardHi there, I need help with this question for control systems engineering. Thank you.arrow_forwardQ8 Figure Q8 shows a plant of transfer function G(s) to be operated in closed-loop, with unity negative feedback, where the controller is a simple gain factor K-4, and G(s)-- R E 2 s²+7s+2 controller U. G(s) Figure Q8 (a) Obtain poles of this closed-loop system and determine if this system is stable. (b) Use Routh test to determine range of the controller gain factor K values that would make this closed loop system stable. (c) Formulate Nyquist stability criterion and discuss how this criterion can be used to determine stability of the closed-loop system shown in Figure Q8arrow_forward
- The block diagram representation of a tachometer feedback speed control system is shown in Figure 4. R(s) + 15.5 C(s) s+1 Tachometer Ko Figure 4 (i). Develop the closed loop transfer function. (ii). Evaluate the value of DC gain K and the time constant T with the assumption of tachometer feedback variable Ko. (ii). The system step response is represented by y = K(1 – e), sketch the step response curve for the system when the tachometer feedback variable Ko. (iv). Write a general MATLAB codes to reduce the block diagram into a single feedback control system, to calculate transfer function and to obtain unit step response and impulse response. (v). Comment on the step response curve which is obtained in (i) and (iv) with respect to K and time constant T. ko=2 k1=2.2 Note: Refer the Table for Ko and K, values.arrow_forwardFor a lead compensator whose zero is (-2,0) is used in a feedback control system to provide a phase lead of 45 .for desired pole location (S1=-2+3.3j), that represents the design specifications, this compensators pole is atarrow_forwardOnly parts B and C. No matlabarrow_forward
- QUESTION 1 A unity feedback system has open loop transfer function shown below. Find K1 so that the damping ratio = 0.4 and the peak time t,=2 seconds. Here the peak time tp = wa K1 s+ KzK2) HG(s) =arrow_forwarda) Consider the feedback system in Figure Q4 with controller G (s)=- and plant s+a 100 G,(s)=- s+25 Specify K and a of G,(s) such that the overall closed-loop response to a unity step reference input has a maximum percentage overshoot (%OS) of 25% and a 1% settling time of 0.1sec. [Hint: use the approximate relationship %OS = 1 x100% ] 0.6 b) To make the steady-state error to a unit step reference input zero, add an integrator to K. the controller of Q4a, i.e. G,(s)=- Assuming that a has the value derived in s(s+a) Q4a do the following: (0 Draw the root-locus of the closed-loop system, as K takes all positive real values, by computing the locus on the real axis, the angles of asymptotes, the point of intersection of the asymptotes with the real axis and the break points. Show clearly with arrows the direction of the loci. (ii) Find the value of K so the closed-loop system becomes marginally stable. In that case compute the points of intersection of the loci with the imaginary axis.…arrow_forwardExplain what is going on herearrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Introductory Circuit Analysis (13th Edition)Electrical EngineeringISBN:9780133923605Author:Robert L. BoylestadPublisher:PEARSON
 Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning
Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education  Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education
Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON
Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:9780133923605
Author:Robert L. Boylestad
Publisher:PEARSON
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:9781337900348
Author:Stephen L. Herman
Publisher:Cengage Learning
Programmable Logic Controllers
Electrical Engineering
ISBN:9780073373843
Author:Frank D. Petruzella
Publisher:McGraw-Hill Education
Fundamentals of Electric Circuits
Electrical Engineering
ISBN:9780078028229
Author:Charles K Alexander, Matthew Sadiku
Publisher:McGraw-Hill Education
Electric Circuits. (11th Edition)
Electrical Engineering
ISBN:9780134746968
Author:James W. Nilsson, Susan Riedel
Publisher:PEARSON
Engineering Electromagnetics
Electrical Engineering
ISBN:9780078028151
Author:Hayt, William H. (william Hart), Jr, BUCK, John A.
Publisher:Mcgraw-hill Education,