
Computer Networking: A Top-Down Approach (7th Edition)
7th Edition
ISBN: 9780133594140
Author: James Kurose, Keith Ross
Publisher: PEARSON
expand_more
expand_more
format_list_bulleted
Related questions
Question

Transcribed Image Text:# Block Stacking Robot Actions and Planning
Consider a block stacking robot with the following actions:
### Actions:
1. **Stack(x, y)**
- Preconditions:
- Clear(y)
- Holding(x)
- Effects:
- ¬armEmpty
- On(x, y)
- ¬Clear(y)
- ¬Holding(x)
2. **Unstack(x, y)**
- Preconditions:
- Clear(x)
- On(x, y)
- armEmpty
- Effects:
- ¬armEmpty
- ¬On(x, y)
- Clear(y)
- Holding(x)
3. **Pickup(x)**
- Preconditions:
- Clear(x)
- On(x, TABLE)
- armEmpty
- Effects:
- ¬armEmpty
- ¬On(x, TABLE)
- Holding(x)
4. **Putdown(x)**
- Preconditions:
- Holding(x)
- Effects:
- armEmpty
- On(x, TABLE)
- ¬Holding(x)
### Plan Creation:
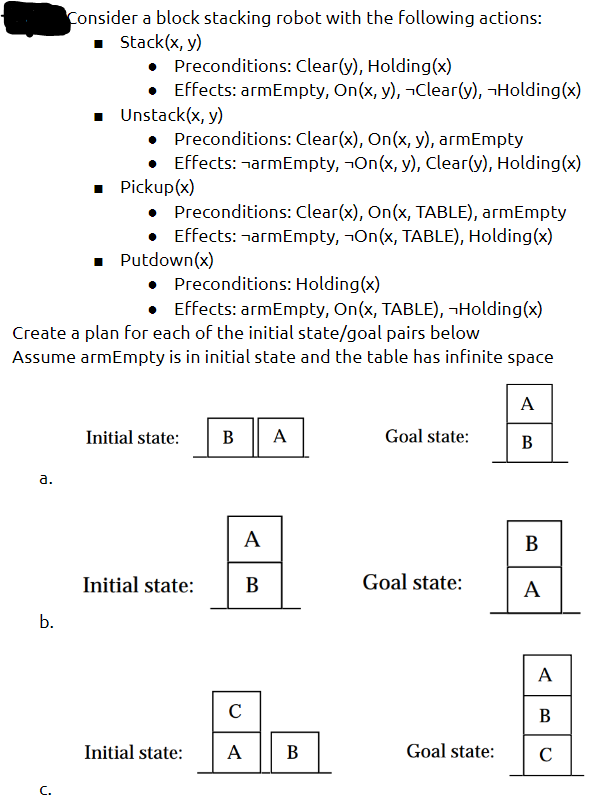
Create a plan for each of the initial state/goal pairs below. Assume `armEmpty` is in the initial state and the table has infinite space.
#### a. Transition From Initial State to Goal State:
- **Initial State**: B is on the table, A is on the table.
- **Goal State**: A is on the table, B is on A.
#### b. Transition From Initial State to Goal State:
- **Initial State**: A is on the table, B is on A.
- **Goal State**: B is on the table, A is on B.
#### c. Transition From Initial State to Goal State:
- **Initial State**: C is on the table, A is on B (which is on the table).
- **Goal State**: A is on the table, B is on C (which is on the table).
Each scenario requires planning the sequence of actions (Stack, Unstack, Pickup, Putdown) to achieve the desired goal state from the given initial state while respecting the robot's action constraints and preconditions.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution

Trending nowThis is a popular solution!

Step by stepSolved in 2 steps with 2 images

Knowledge Booster

Similar questions
- Construct a PDA that recognizes the following language: {x\in {a,b}* : #a(x) = #b(x)} Hint: To get the maximum number of points, use as few states and nonterminals as possible! Alphabet: (a, b) o Stack alphabet (the first symbol is the initial one): Z Y X o Acceptance condition: empty stack Deterministic (DPDA): false Hints apply +arrow_forwardGive an example of a bounded stack and then one that is unbounded.arrow_forwardGive an example of a bounded stack and then one that is unbounded.arrow_forward
- Multi-layered perceptrons (MLP) represent an abstraction of neuronal networks in brains. a) Describe how MLPs process an input to produce an output.b) Backpropagation is often used to learn the weights of an MLP. Give a very brief description of how it works.arrow_forwardImplement a queue Q with two stacks S1 and S2, so that the stacks that operate together as a queue may perform the operations ENQUEUE(Q, X) and DEQUEUE(Q, Y), where Q appears to be a queue and X is the element to be inserted into Q and Y is the element to be removed from Q. Assume that the ADT operations PUSH, POP, and EMPTYSTACK are only available for stacks.Show how your technique works on a list a, b, c, which will be utilised as a queue by the stacks S1 and S2.arrow_forwardData structure and algorithm in javaarrow_forward
- Implement a stack algorithm (write pseudocode) assuming there is a bound, in any state of the execution, on the total difference between the number of pushes and pops to the stack.arrow_forwardImplement a stack S using two queues Q1 and Q2 so that operations PUSH (S,X) and POP(S, Y), where S is supposedly a stack and X is the element to be insertedinto S and Y the element deleted from S, are worked upon by the queues that operatetogether as a stack. Assume that the ADT operations of ENQUEUE, DEQUEUE andEMPTYQUEUE are only available for the queues.Demonstrate the working of your method on a list {a, b, c}, which is to beoperated upon as a stack by the queues Q1 and Q2.arrow_forwardTwo stacks of positive integers are needed, one containing elements withvalues less than or equal to 1,000 and the other containing elements with values larger than 1,000.The total number of elements in the small-value stack and the large-value stack combined are notmore than 200 at any time, but we cannot predict how many are in each stack. (All of the elements2could be in the small-value stack, they could be evenly divided, both stacks could be empty, andso on.). Implement the push operation; it should store the new item into the correct stack accordingto its value (compared to 1,000).arrow_forward
- Answer the following two questions correctly. This is in Python. Explain your reasoning.arrow_forwardThe following figure is a diagram of a small convolutional neural network that converts a 16x16 image into 4 output values (16x16 - 4x12x12 → 4x6x6 6x1). The network has the following layers/operations from input to output: convolution with 4 filters, max pooling, ReLu (after pooling), and finally a fully-connected layer (with no hidden layer). For this network we will not be using any bias/offset parameters. Please answer the following questions about this network. 16x16 Convolution 4 filters 5x5 Stride 1 4@12x12 max pooling 2x2 Stride 2 4@6x6 6x1 fully- connectedarrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Computer Networking: A Top-Down Approach (7th Edi...Computer EngineeringISBN:9780133594140Author:James Kurose, Keith RossPublisher:PEARSON
 Computer Organization and Design MIPS Edition, Fi...Computer EngineeringISBN:9780124077263Author:David A. Patterson, John L. HennessyPublisher:Elsevier Science
Computer Organization and Design MIPS Edition, Fi...Computer EngineeringISBN:9780124077263Author:David A. Patterson, John L. HennessyPublisher:Elsevier Science Network+ Guide to Networks (MindTap Course List)Computer EngineeringISBN:9781337569330Author:Jill West, Tamara Dean, Jean AndrewsPublisher:Cengage Learning
Network+ Guide to Networks (MindTap Course List)Computer EngineeringISBN:9781337569330Author:Jill West, Tamara Dean, Jean AndrewsPublisher:Cengage Learning  Concepts of Database ManagementComputer EngineeringISBN:9781337093422Author:Joy L. Starks, Philip J. Pratt, Mary Z. LastPublisher:Cengage Learning
Concepts of Database ManagementComputer EngineeringISBN:9781337093422Author:Joy L. Starks, Philip J. Pratt, Mary Z. LastPublisher:Cengage Learning Prelude to ProgrammingComputer EngineeringISBN:9780133750423Author:VENIT, StewartPublisher:Pearson Education
Prelude to ProgrammingComputer EngineeringISBN:9780133750423Author:VENIT, StewartPublisher:Pearson Education Sc Business Data Communications and Networking, T...Computer EngineeringISBN:9781119368830Author:FITZGERALDPublisher:WILEY
Sc Business Data Communications and Networking, T...Computer EngineeringISBN:9781119368830Author:FITZGERALDPublisher:WILEY
Computer Networking: A Top-Down Approach (7th Edi...
Computer Engineering
ISBN:9780133594140
Author:James Kurose, Keith Ross
Publisher:PEARSON
Computer Organization and Design MIPS Edition, Fi...
Computer Engineering
ISBN:9780124077263
Author:David A. Patterson, John L. Hennessy
Publisher:Elsevier Science
Network+ Guide to Networks (MindTap Course List)
Computer Engineering
ISBN:9781337569330
Author:Jill West, Tamara Dean, Jean Andrews
Publisher:Cengage Learning
Concepts of Database Management
Computer Engineering
ISBN:9781337093422
Author:Joy L. Starks, Philip J. Pratt, Mary Z. Last
Publisher:Cengage Learning
Prelude to Programming
Computer Engineering
ISBN:9780133750423
Author:VENIT, Stewart
Publisher:Pearson Education
Sc Business Data Communications and Networking, T...
Computer Engineering
ISBN:9781119368830
Author:FITZGERALD
Publisher:WILEY