
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
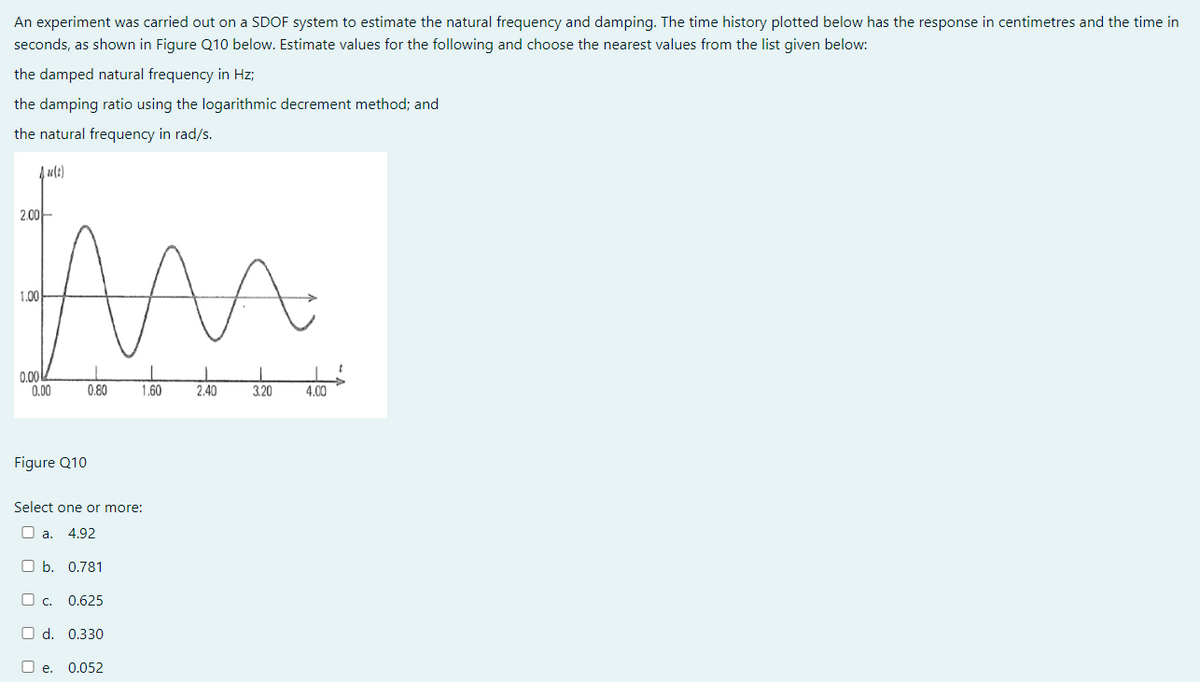

Transcribed Image Text:An experiment was carried out on a SDOF system to estimate the natural frequency and damping. The time history plotted below has the response in centimetres and the time in
seconds, as shown in Figure Q10 below. Estimate values for the following and choose the nearest values from the list given below:
the damped natural frequency in Hz;
the damping ratio using the logarithmic decrement method; and
the natural frequency in rad/s.
Ju(t)
2.00
AMA
1.00
0.00
0.00
Figure Q10
0.80
1.60
Select one or more:
O a. 4.92
b. 0.781
c. 0.625
O d. 0.330
O e.
0.052
2.40
3.20
4.00
t
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution

Trending nowThis is a popular solution!

Step by stepSolved in 3 steps with 3 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- A force of 20 newton stretches a spring 1 meter. A 5 kg mass is attached to the spring, and the system is then immersed in a medium that offers a damping force numerically equal to 10 times the instantaneous velocity. 1) Let x denote the downward displacement of the mass from its equilibrium position. [Note that x>0 when the mass is below the equilibrium position. ] Assume the mass is initially released from rest from a point 3 meters above the equilibrium position. Write the differential equation and the initial conditions for the function x(t) 2) Solve the initial value problem that you wrote above. 3)Find the exact time at which the mass passes through the equilibrium position for the first time heading downward. (Do not approximate.) 4)Find the exact time at which the mass reaches the lowest position. The "lowest position" means the largest value of xarrow_forward2. The equation of motion for a damped multidegree of freedom system is given by Where [m] = [m]{x} + [c]{x} + [k]{x} = {f} [100 = 0 0 0 10 0 10. 1000-4 {f} [c] 8 –4 0 8 – 4 -4 4 0 8 4 = 100 2 0 = Focos(wt) -2 -2 The value of Fo 50N and w 50 rad/sec. Assuming the initial conditions to be zero and using the modal coordinate approach, find out the steady state solution of the system in the modal coordinate for first mode. Plot the steady state solution using the computational tools. 0 −2], [k] = = 2arrow_forwardThe mass, damping, and stiffness of the system m C can be adjusted to produce different dynamic responses. Match the frequency response functions (A)-(D) with their corresponding time-histories (W)-(Z). (W) (X) (A) (B) (Z) (D) (Y) A [Choose ] [ Choose ] [ Choose ] D [Choose ] B.arrow_forward
- 1 Problem You are given the following data (below) showing the steady-state output response, x(t), of a mass-spring-damper (stable, LTI) system to a sinusoidal input u(t) = A sin(wt). This snapshot is the response after all the transients have decayed (the time is shifted to start at zero for conve- nience). x 0.5225 Displacement pu(t) Sinusoidal force input x 0.1041 1.5 1 Y2 х 0.2783 Y1.372 0.5 h ok -0.5- -1 -1.5 x(t) M Assume: bl u(t) x(t) Horizontal Plane (no gravity) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Time (sec) www k Using only the data provided above (the blue line is the input u(t) and the red line is the output x(t)), determine: 1. The frequency of the input in rad/s 2. The amplitude of the input, A 3. The frequency of the output in rad/s 4. The output-input ratio |G(iw)| = max(x(t)) max(u(t))' at the particular input frequency shown. 5. The phase (also called phase lag) of the output, $, at the particular input frequency shown in degrees. Note the phase is generally…arrow_forwardA test was undertaken to find the dynamic properties of a SDOF system. The measured transient response recorded is shown in Figure QA2a. If the stiffness of the system is 1,000 N/m estimate: i) the damping ratio, ii) the undamped natural frequency, and iii) the mass of the system. Displacement (m) 0.08 0.06 0.04 0.02 O -0.02 -0.04 -0.06 -0.08 Figure QA2a 0.5 Time (s) 1.5 2arrow_forwardMatlabarrow_forward
- otoring: MITO R (Motor) = VAPPL Torque [N*m] 60 T 0₁ V 200 rad/s W₁ Viscous Friction b₁ N₁ J₁ 2 N₂ b₂ Viscous Friction J₂ VMOTOR K, W₁ T=K₁ i 0₂ ta from the steady state dynamometer test and the given values: J₁ ², b₁ 2N, b2 = 12N, N₁ = 50 teeth, N₂ = 100 teeth (R should rad'arrow_forwardSketch frequency response of the system from part (a) in the form of Bode plot as accurately as you can.arrow_forward(c) An electronic Pl temperature controller has an output p of 15 mA when the set point equals the nominal process temperature. The controller response to step change in the temperature set point of 3 mA is shown below. t(s) 0- 0+ 20 60 80 Determine the controller gain K, and the integral time.r p (mA) 8,0 6,8 6.0 4.4 3.6arrow_forward
- 4) Consider the system below. Write the equation of motion and calculate the response assuming that the system is initially at rest for the values k₁ 100[N/m], k2= 100[N/m], k3 = 200[N/m], 100[N/m], k5 = 50[N/m], k6: 50[N/m], and m = = [10kg]. Solve the equation of motion k4 = as a differential equation = F(t) = 80 cos (20t) K5 Κι www K3 ΚΑ m www K6 K2arrow_forwardI need help with this please.arrow_forwardA) Assuming that no inputs are present to a first-order and a second-order systems, mention two fundamental differences between the two systems. B) Determine the damping ratio and natural frequency of the single-loop RLC electrical circuit system shown below. d²1 dI I + R + = dt² dt с L E(t). C) State two distinctions between odd and even functions, and name and sketch a function that's neither odd nor even. D) What is the frequency in Hertz and the amplitude of the 5th term (i.e. the 4th harmonics) of the following signal? 4 2π 10π == - sin TT 4 бп y(t) (² t) + 37 sin (17) 4 + sin 5π (10+) +. 10 10arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY