
Mathematics for Machine Technology
7th Edition
ISBN: 9781133281450
Author: John C. Peterson, Robert D. Smith
Publisher: Cengage Learning
expand_more
expand_more
format_list_bulleted
Videos
Textbook Question
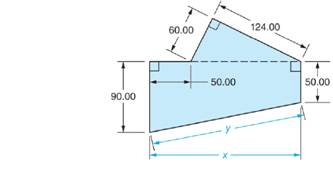
Chapter 52, Problem 27A
Solve the following exercises:
A template is shown. All dimensions are in millimeters. Determine length x and length y to 2 decimal places.
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
Show that these two matrices generate the algebra M₂(Q) over the field Q.
0
1
S :=
and T =
==
-1
-
-1
(13)
Let G = S3, the symmetric group on 3 letters. Show that
K(X,Y)
KG
-
(X21, YX XY², Y³ —– 1) '
-
(Hint: Write S3
(12) and Y
X
S3 as a group.)
=
{id, (12), (23), (13), (123), (132)}. Consider the map from
→ (123). You may assume that these two elements generate
Consider a simplified two-joint robotic arm where the two joints are connected by rigid links.Each joint has a mass, and the links are modeled as idealized rods. The motion of each jointaffects the other through the coupling of forces. The system can be modeled by the followingsecond-order coupled ODEs:
m1θ1" + k1(θ1 − θrest) + k3(θ1 − θ2) = 0 (equation 1)m2θ2" + k2(θ2 − θrest) + k3(θ2 − θ1) = 0 (equation 2)
where θ1(t) and θ2(t) represent the angular positions of the first and second joints, respec-tively. m1 and m2 are the effective masses at each joint. k1, k2 and k3 are the stiffnessconstants representing the elastic restoring forces in the joints and links. θrest = 0 representsthe equilibrium position for each joint.The parameters are:m1 = 1, m2 = 1, θrest = 0, k1 = 1, k2 = 2, k3 = 3, θrest = 0The initial conditions are:θ1(0) = 1, θ2(0) = 2Please solve by hand to get θ1(t) and θ2(t) using eigenvectors and eigenvalues. Show all steps/calculations, and provide a written description…
Chapter 52 Solutions
Mathematics for Machine Technology
Ch. 52 - Determine the size of 1.Ch. 52 - If ABCD,BCDE , and 1=2725 , what are the sizes of...Ch. 52 - What is the supplement of a 1051344 angle?Ch. 52 - Determine the center diameter of a pinion gear...Ch. 52 - Solve 578=234x.Ch. 52 - Determine the value of 406.442-1/3. Round the...Ch. 52 - Determine which of the following pairs of...Ch. 52 - Solve the following exercises: In ABC and...Ch. 52 - Solve the following exercises: In figure,...Ch. 52 - Solve the following exercises: In ABC and...
Ch. 52 - Solve the following exercises: Use the figure to...Ch. 52 - Solve the following exercises: In HPM,PMJK. a....Ch. 52 - Solve the following exercises: Refer to the figure...Ch. 52 - Solve the following exercises: Refer to the figure...Ch. 52 - Solve the following exercises: In this figure,...Ch. 52 - Solve the following exercises: a. Find x. b. Find...Ch. 52 - Solve the following exercises: a. Find x. b. Find...Ch. 52 - All dimensions are in inches. a. Find 1. b. Find ...Ch. 52 - All dimensions are in millimeters. a. Find x. b....Ch. 52 - All dimensions are in inches. a. Find 1. b. Find...Ch. 52 - Refer to this figure. Using the given values, find...Ch. 52 - Using the figure and these given values, find the...Ch. 52 - Using the figure and these given values, find the...Ch. 52 - Three holes are drilled in the plate shown. All...Ch. 52 - All dimensions are in inches. Round the answers to...Ch. 52 - All dimensions are in inches. Round the answers to...Ch. 52 - Solve the following exercises: A template is...Ch. 52 - Refer to polygon ABCD. a. If 2 = 87.0, find 1. b....Ch. 52 - Use the angle values given. a. If 1 = 114, find 2....Ch. 52 - Use the angle values given to find 2. a. If 1 =...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, advanced-math and related others by exploring similar questions and additional content below.Similar questions
- 3feet in 1secound; 21feet in x secondsarrow_forward(15 pts) Show your work to get full credit! Compute a QR factorization of the matrixarrow_forward(5) Let G be a group. Show that G acts on itself via the action g⚫a (i.e. using the binary operation of G) for all g, a Є G. [ for each of the three axioms, plus 1 for conclusion] = gaarrow_forward
- = (2) Let H {id, (12) (34), (13)(24), (14)(23)}. Prove that H is a sub- group of the symmetric group S4 of degree 4. each of the four axioms, plus 1 for the conclusion] 1 forarrow_forward(15 pts) Show your work to get full credit! Compute a singular value decomposition of the matrix A-( 7²)arrow_forwardSudoku Puzzle Rules Solving a Sudoku puzzle does not require the knowledge of mathematics but it does require logical thinking. A Sudoku puzzle is a grid of nine by nine squares or cells that have been subdivided into nine "regions" of three by three cells. Consider the following diagram: The objective of Sudoku is to enter a digit from 1 through 9 in each cell, in such a way that: Each horizontal row (shown in blue) contains each digit exactly once. Each vertical column (shown in pink) contains each digit exactly once. Each sub grid or region (shown in orange) contains each digit exactly once. In each Sudoku puzzle, some digits have already been entered, you may not change these. Your job is to fill the remaining cells with digits keeping in mind the three rules discussed above. Sudoku puzzles have become so popular that they can be found in newspapers and magazines around the world. If you are ever planning a long trip where you may be stuck in a car, Sudoku can help to pass the…arrow_forward
- (3) Let G be a group and let gЄ G. Prove that the function f : G→ G given by f(x) = gx is bijective (i.e. injective, and surjective). [ 2 for injectivity, 2 for surjectivity, 1 for bijectivity]arrow_forward(4) Let X = {(a,b) : a,bЄ Z, a on X given by (a, b) R(c, d) if ad 0,60}. Show that the relation R = bc is an equivalence relation. [ 1 for reflexivity, 1 for symmetry, 1 for transitivity, 1 for conclusion]arrow_forward(15 pts) Show your work to get full credit! Compute a diagonalization of the matrix -1 0 0 A = 0 1 1 0 20arrow_forward
- (1) Let G = R \ {1}. the set of all real numbers except 1. Show that G, together with the operation * given by x * y = x + y = xy for all x, y Є G, is a group. [5: 1 for each of the four axioms, and 1 for the conclusion] Hint: See Question 3.2 in the Course Notes for an example of how to write this down formally. See also Exercise 7 in Section 4.7 of [Groups, C. R. Jordan and D. A. Jordan], available online via the Libraryarrow_forwardInstructions: Instructions: Please show as much work as possible to clearly show the steps you used to find the solution. Part 1: In M4LE1 Hand-in Assignment you were to select a vehicle you would like to drive. In this hand-in assignment you are to choose a similar (or same) vehicle and find the cost to lease it. Describe the vehicle by stating make, model, special features, colour, et cetera. Find the price of the vehicle. You may look for the price at a dealer, in a newspaper, on TV, on the Internet, or source of your choice. Be sure to indicate the price and where you found the information. Assume that you have $5000 for a down payment to apply to the lease. Calculate the total cost of leasing the vehicle, including the down payment and applicable taxes. You may want to use a leasing calculator. Be sure to show how you arrived at your answer. Part 2: Compare the cost of buying the vehicle using your information from M4LE1 to the cost of leasing determined in Part 1. Would…arrow_forwardNo chatgpt Asap Upvotearrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning, Elementary Geometry For College Students, 7eGeometryISBN:9781337614085Author:Alexander, Daniel C.; Koeberlein, Geralyn M.Publisher:Cengage,
Elementary Geometry For College Students, 7eGeometryISBN:9781337614085Author:Alexander, Daniel C.; Koeberlein, Geralyn M.Publisher:Cengage, Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL
Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL Algebra: Structure And Method, Book 1AlgebraISBN:9780395977224Author:Richard G. Brown, Mary P. Dolciani, Robert H. Sorgenfrey, William L. ColePublisher:McDougal Littell
Algebra: Structure And Method, Book 1AlgebraISBN:9780395977224Author:Richard G. Brown, Mary P. Dolciani, Robert H. Sorgenfrey, William L. ColePublisher:McDougal Littell Glencoe Algebra 1, Student Edition, 9780079039897...AlgebraISBN:9780079039897Author:CarterPublisher:McGraw Hill
Glencoe Algebra 1, Student Edition, 9780079039897...AlgebraISBN:9780079039897Author:CarterPublisher:McGraw Hill
Mathematics For Machine Technology
Advanced Math
ISBN:9781337798310
Author:Peterson, John.
Publisher:Cengage Learning,
Elementary Geometry For College Students, 7e
Geometry
ISBN:9781337614085
Author:Alexander, Daniel C.; Koeberlein, Geralyn M.
Publisher:Cengage,
Holt Mcdougal Larson Pre-algebra: Student Edition...
Algebra
ISBN:9780547587776
Author:HOLT MCDOUGAL
Publisher:HOLT MCDOUGAL
Algebra: Structure And Method, Book 1
Algebra
ISBN:9780395977224
Author:Richard G. Brown, Mary P. Dolciani, Robert H. Sorgenfrey, William L. Cole
Publisher:McDougal Littell
Glencoe Algebra 1, Student Edition, 9780079039897...
Algebra
ISBN:9780079039897
Author:Carter
Publisher:McGraw Hill
Quadrilaterals: Missing Angles and Sides; Author: rhornfeck;https://www.youtube.com/watch?v=knVj1O0L2TM;License: Standard YouTube License, CC-BY
STD IX | State Board | Types of Quadrilateral; Author: Robomate;https://www.youtube.com/watch?v=wh0KQ4UB0EU;License: Standard YouTube License, CC-BY