
Concept explainers
Videos
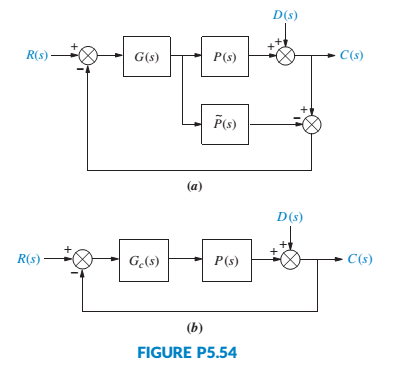
Parabolic trough collector. Effective controller design for parabolic trough collector setups is an active area of research. One of the techniques used for controller design (Camacho, 2012) is Internal Model Control (IMC). Although complete details of IMC will not be presented here, Figure P5.54 (a) shows a block diagram for the IMC setup. Use of IMC assumes a very good knowledge of the plant dynamics. In Figure P5.54(a), the actual plant is P(s).
a. Use superposition (by assuming D(s) = 0) and Mason's gain formula to find the transfer function
b. Use superposition (by assuming R(s) = 0) and Mason's gain formula to find the transfer function
c. Use the results of Parts a and b to find the combined output C(s) due to both system inputs.
d. Show that the system of Figure P5.54(a) has the same transfer function as the system in
Figure P5.54(b) when
Want to see the full answer?
Check out a sample textbook solution
Chapter 5 Solutions
Control Systems Engineering


- One of the beneficial applications of an automotive control system is the active control of the suspension system. One feedback control system uses a shock absorber consisting of a cylinder filled with a compressible fluid that provides both spring and damping forces. The cylinder has a plunger activated by a gear motor, a displacement-measuring sensor, and a piston. Spring force is generated by piston displacement, which compresses the fluid. During piston displacement, the pressure imbalance across the piston is used to control damping. The plunger varies the internal volume of the cylinder. This system is shown in Fig.la. The system can be represented by the block diagram shown in Fig. 1b, where: Control output Plunger Gear motor Cylinder Controller Piston Liquid Sensor output Damping orifice Piston travel Piston rod Fig.la: Shock absorberarrow_forwardThis question asks for matrix form and NOT state space, but I don't understand what the difference between the two are.arrow_forwardpenaulum shown in the figure, the nonlinear equations of motion are given by where g is gravity, L is the length of the pendulum, m is the mass attached at the end of the pendulum (we - 0. assume the rod is massless), and k is the coefficient of sin e friction at the pivot point. a) Obtain a state-variable representation of the system. b) Linearize the dynamics and obtain a state-space representation of the system around the equilibrium position @ = 180 degrees, ở = 0. Pvor point Llength c) A constant torque, in counter-clockwise direction, is applied as an input to the pendulum. Angular position is the measured output. Derive the transfer function from the torque to angular position for the linearized pendulum system obtained in part b). Massles rod m, massarrow_forward
- Reduce the block diagram to a single transfer function.arrow_forwardroot locus electrical engineering Don't overthink and reject. Complete the solution as per the given transfer function. No need of quadratic equation just simplify for the exact given transfer function.arrow_forwardFind: State-space representation Note: Output of mechanical system is X3(t) Given: M1=1 kg, M2=1 kg, M3=1 kg K1=1 N/m, K2=1 N/m Fv1=1 N-s/m, Fv2=1 N-s/m, Fv3=1 N-s/m, Fv4=1 N-s/marrow_forward
- Question 5: A model for a single joint of a robotic manipulator is shown in Figure below. The usual notation is used. The gear inertia is neglected and the gear reduction ratio is taken as 1:r (Note: r < 1). a) Draw a linear graph for the model, assuming that no external (load) torque is present at the robot arm. b) Using the linear graph derive a state model for this system. The input is the motor magnetic torque Tm and the output is the angular speed o, of the robot arm. What is the order of the system? Jm m (viscous) 1:r Motor Robot Arm Gear Box (Light)arrow_forwardThe governor is a mechanically-controlled feedback device which maintains the speed of an engine within permissible range whenever there is a variation of load. There is various type of governor in the industry as shown in Q6(a). With the aid of a diagram of forces acting on the governor at the equilibrium, explain the limitations of a Watt governor and how these are rectified in the Porter governor. Figure Q6(a): Various types of governor.arrow_forwardDerive the state-space model (state equation and output equation) in vector form for the following system. The system outputs are the displacements of each spring. Assume that the connection between the spring and rope is massless and that the rope is inextensible. Assume that gravity is an input as well as the applied forces Fi(t) and F2(t). Neglect friction forces on mass m₂. If q₁ is the state variable for the bottom spring connected to m₁, q2 is the state variable for the mass m₁, q3 is the the top spring connected to the pulley, and q4 is the state variable connected to the mass m2, then you should expect to get the following state-space representation: 92 43 y 0 LaLa (L+L) 0 4₂ kL₂ mi Li 0 m2 0 13 (L+L) 0 CA = - [8] 92 93 + 92 93 + L94 m₂ F₂(t) m₂ TOL F₂(t) Figure 2: Diagram for problem 2 X5 00 X2 [000] 00 U₁ U12 U13 m₂. 21 142 143arrow_forward
- For the given close-loop system transfer function, determine its stability using Routh-Hurwitz Test for Stability.1. What is the stability of the system? (Stable, Unstable, Marginally Stable)arrow_forwardThe close loop system block diagram is given below .Find the transfer function of the given system.arrow_forward2. Assume a 2 DOF rigid body with a rigid bar, which is supported by a two-spring damper :3k4, m = supports. Inertia and length of the rigid body are I = 10kg and L= 4m. (a) Derive the mathematical model of the system in variable form (b) Write the state space representation of the above system. (c) k₁= k₂ = 800N.m and c₁ = C₂ = 350N.s/m Develop a simulink model and plot all the system response for input y = sin(wt), where w 1 rad = S (d) k₁ 400v, k₂ 800N.m and c₁ = 175N.s/m, c₂ 350N.s/m Develop a simulink model and plot all the system response for input y = sin(wt), where w = = 1 rad 8 - L/4 k₁,c m, I L/4 k₂,c y = sin wtarrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY