
Concept explainers
Videos
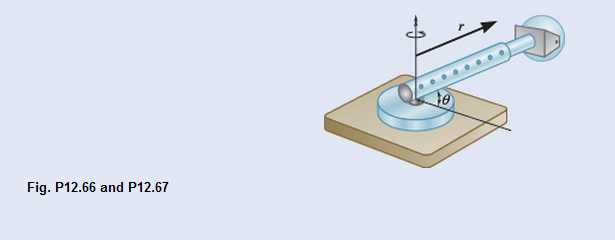
An advanced spatial disorientation trainer allows the cab to rotate around multiple axes, as well as to extend inward and outward. It can be used to simulate driving, fixed-wing aircraft flying, and helicopter maneuvering. In one training scenario, the trainer rotates and translates in the horizontal plane, where the location of the pilot is defined by the relationships
(a)
The magnitude of the resulting force on pilot.
Answer to Problem 12.66P
We got force
Explanation of Solution
Given information:
Time
Concept used:
Calculation:
Derivatives,
Force components,
Resultant force,
Conclusion:
We got force
(b)
Plot the radial and transverse components of force.
Answer to Problem 12.66P
Plot is in explanation part.
Explanation of Solution
Given information:
Time
Concept used:
Calculation:
Derivatives,
Force components,
Table of
| t (sec) | 0.0 | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 | 4.5 | 5.0 | 5.5 |
| Fr (lb) | -12.6 | -11.0 | -11.3 | -13.6 | -18.0 | -26.1 | -40.7 | -65.6 | -104.1 | -157.1 | -221.8 | -291.5 |
| t (sec) | 6.0 | 6.5 | 7.0 | 7.5 | 8.0 | 8.5 | 9.0 | 9.5 | 10.0 |
| Fr (lb) | -356.9 | -408.8 | -441.7 | -457.0 | -464.0 | -478.9 | -520.7 | -604.9 | -738.2 |
Plot,
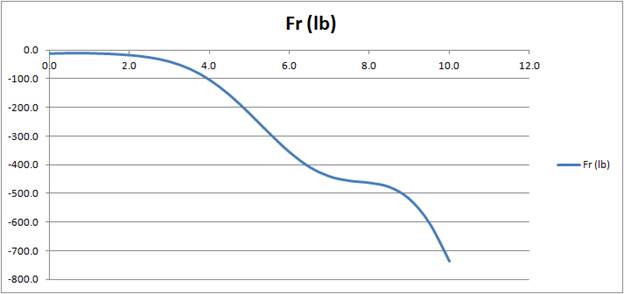
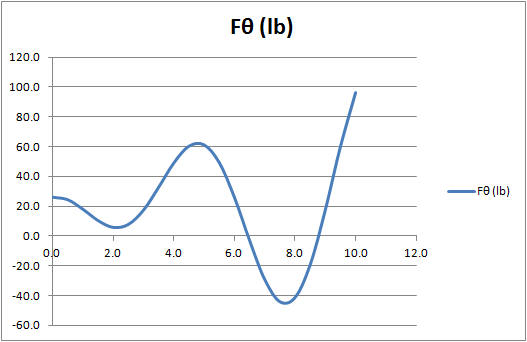
Table of
| t (sec) | 0.0 | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 | 4.5 | 5.0 | 5.5 |
| F? (lb) | 26.1 | 24.4 | 18.0 | 10.4 | 5.8 | 7.7 | 17.4 | 32.8 | 49.2 | 60.4 | 61.4 | 49.4 |
| t (sec) | 6.0 | 6.5 | 7.0 | 7.5 | 8.0 | 8.5 | 9.0 | 9.5 | 10.0 |
| F? (lb) | 26.0 | -3.0 | -29.4 | -44.3 | -41.5 | -19.5 | 17.5 | 60.2 | 96.5 |
Plot,
Conclusion:
Plots are mentioned the explanation part.
Want to see more full solutions like this?
Chapter 12 Solutions
Vector Mechanics For Engineers


- Newton's Third Law states that: A particle remains at rest or continues to move with a uniform velocity if there is no unbalanced force acting on it. The acceleration of a particle is proportional to the vector sum of forces acting on it, and is in the direction of this vector sum. The forces of action and reaction between interacting bodies are equal in magnitude, opposite in direction, and collinear. The velocity of a particle is proportional to the vector sum of forces acting on it, and is in the direction of this vector sum.arrow_forward(a) Suppose you know the coordinates of two points A and B. How do you determine the scalar components of the position vector of point B relative to point A? (b) During the construction of a bridge, a bracket shown in Figure 1 was used to temporarily hold two cables FA and Fg = 600 N. After a while, you noticed that the bracket is shaking and slowly being pulled out of the wall by the cables. Given that e = 20°, find the resultant force and its direction counter clockwise from the positive y axis. FA 700 N 30 A Figure 1arrow_forwardZorch, an archenemy of Superman, decides to slow Earth’s rotation to once per 29 h by exerting a force parallel to the equator, opposing the rotation. Superman is not immediately concerned, because he knows Zorch can only exert a force of 4.15 × 107 N. For the purposes calculations in this problem you should treat the Earth as a sphere of uniform density even though it isn't. a. How long, in seconds, must Zorch push with this force to accomplish his goal? (This period gives Superman time to devote to other villains.)arrow_forward
- Position of a particle in a rectangular- co-ordinate system is (5, 2, 3). Then its position vector will be * 5 i + 2 j+ 3 k 3 i+ 2j+ 5 k O 2i+ 3 j+ 5 k O 5i+ 3 j+ 2 karrow_forwardA projectile fired from the point (0,0) at an angle to the positive x-axis has a trajectory given by y= Cx- (1 + C2) In this formula, x is the horizontal distance in X. meters, y is the height in meters, v is the initial velocity in meters per second, g = 9.81 m/ sec is the acceleration due to gravity, and C>0 is a constant determined by the angle of elevation. A howitzer fires an artillery round with a velocity of 899 m/sec. Answer parts (a) and (b). (a) If the round must clear a hill 244 meters high at a distance of 2064 meters in front of the howitzer, what C values are permitted in the trajectory equation? (Type your answer in interval notation. Round the final answer to the nearest thousandth as needed. Round all intermeniate values to five decimal places as needed.) (b) If the goal in part (a) is to hit a target on the ground 79 kilometers away, is it possible to do so? If so, for what values of C? If not, what is the maximum distance the round will travel? Select the correct…arrow_forwardNumber of Degrees of freedom is the minimum number of dependent coordinates required to determine completely the positions of all parts of a system at any instant of time true falsearrow_forward
- OLScClowHxaMVqbhPU. O 10 Relative to the origin, point P has position vector 3i + j- 4k and Q has position vector i -j+ 3k. What is QP? * 2i - 7k O - 21 - 2j + 7k 3i -j- 12k O 21 + 21 - 7k The vector projection of a vector 3i + 4k on y-axis is Zero Position ofa particle ina rectangular coom nate system is (3. 2.51 Thenarrow_forwardNewton's Third Law states that: The velocity of a particle is proportional to the vector sum of forces acting on it, and is in the direction of this vector sum. The acceleration of a particle is proportional to the vector sum of forces acting on it, and is in the direction of this vector sum. The forces of action and reaction between interacting bodies are equal in magnitude, opposite in direction, and collinear. O A particle remains at rest or continues to move with a uniform velocity if there is no unbalanced force acting on it. 7arrow_forwardKinematics deals with the 2 points motion of the bodies with consideration of the forces required to produce the motion. O True O Falsearrow_forward
- A general plane motion is either a translation motion or rotation motion Select one: O True O Falsearrow_forwardYou are working as the design engineer in Pacific Robotics and you are to design a robotic arm for a specific manufacturing process that can hoist from 0° to 140 with a simultancous extension of the arm radially. The tip of the robotic arm M can grip objects as shown in the figure. At any given time, when the robotic arm is at a location 0 = 35°, the arm is hoisting at a constant velocity of 12 /s. If the variable part of the arm length, its velocity and acceleration is given as r 0.65 m, r = 0.29 and i = -0.25 m/s, calculate the velocity and acceleration of the grip M. Also, calculate the radial and transverse forces F, and Fa, on the gripped part M which has a mass of 1.5 kg. M 0.7 marrow_forward3. In Space motion ,all movements can be represented as occurring in a single plane. Plane motion Relative motion Absolute motion 4. In rectilinear motion, the particle move forward backward along curved path along straight line 5. The acceleration is positive when velocity is Increasing Decreasing Constant positivearrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY