
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Question
thumb_up100%
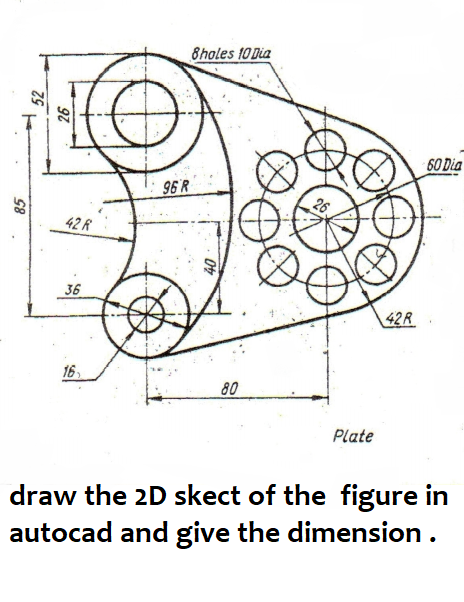

Transcribed Image Text:8holes 10 Dia
60 Dia
96 R
42 R
36
42R
16
80
Plate
draw the 2D skect of the figure in
autocad and give the dimension.
52
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution

Trending nowThis is a popular solution!

Step by stepSolved in 2 steps with 2 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- In the figure below, the location of the tool, WT, is not accurately known. Using force control, the robot feels around with the tool tip until it inserts it into the socket (or Goal) at location T. Once in this "calibration" configuration (in which {G} and {T} are coincident), the position of the robot, T, is figured out by reading the joint angle sensors and computing the kinematics and given below. Assuming T and T are given below, give the transform equation to compute the unknown tool frame, WT. (W) 21arrow_forwardAll problems will use the conventional Cartesian coordinate system unless noted otherwise. Positive x-axis points to the right, Positive y-axis points up, Angles are measured CCW (counter-clock-wise) from the positive x-axis. Problem-BB: Consider FIG-BB in the appendix. AC is a rope. BC is a rope. “C” is a steel ring. “D” is a perfect pulley. A continuous rope connects “C” to the mass. Calculate the internal forces within each rope.arrow_forwardPlz don't use chat gptarrow_forward
- Calculate the mobility of the kinematic chain pleasearrow_forwardDefine and show on the figure the necessary vectors and their angles for second mechanism and construct the corresponding vector-loop equation(s). please draw the vectors and angles and visually show them on mechanism you can name the angles theta1, theta2 etc. it should be looking exactly like the example( first mechanism).arrow_forwardAsap within 30 minutesarrow_forward
- Version B We have worked with Ferris Wheels above ground, but what if a portion of it went underground and traveled in a clockwise direction? Details; The Ferris Wheel has a diameter of 80 ft The Ferris Wheel center is 20 feet below the ground The Ferris Wheel rotates in a clockwise direction The rider enters on ground level on the right side of the wheel. It takes 1 minute for 1 ½ rotations. Your task: Determine the angular speed. Develop an equation for the height of the rider while on the ride. Calculate the rider's total distance traveled from the moment they get on at ground level on the right to the other point on ground level on the left where they get off.arrow_forwardPlease help me with this Kinematics problem. This is for kinematics & dynamics of machines. Thank you.arrow_forwardUse rotation about the current frame to calculate the transformation matrix for a rotation of 90° about yo axis and then 90° about zo axis.arrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY