
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
Decomposition of Planar Linkage
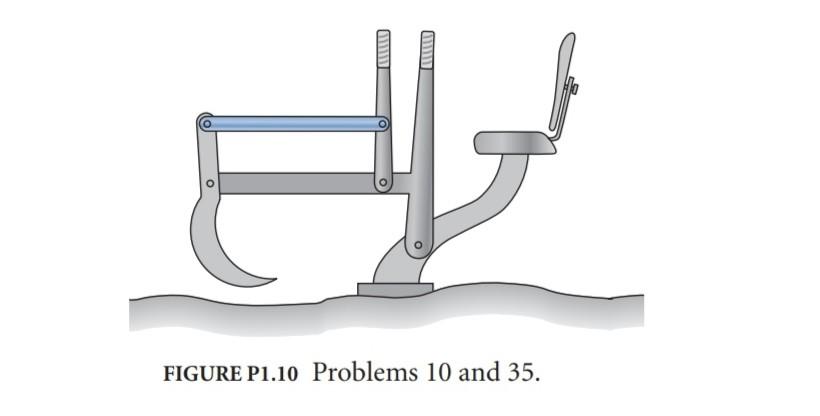

Transcribed Image Text:FIGURE P1.10 Problems 10 and 35.
11111
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 2 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Put in ternary links without changing its mobility. Sketch linkage.arrow_forwardcan you pls provide the wxcat solution for quation of motion with complete explaition by hand written notesarrow_forwardPlease assist with this practice question 7. I don't know where to begin with this. Give details on how to do. Thank you.arrow_forward
- AGmising =AHmixing -TASmting = 2ZA€{x4 - xi}+RT{x4lnx4 +x,lnx3}arrow_forward5. When two frames have the same orientation, then the (W,P,R) values of their corresponding frame transformations are (a) zero (b) non-zero 6. The robot programmer sets up UT[1] for a sharp-tip pointer that is held by the robot gripper. If UT[1] is accurate, it means that (a) UT[1] is activated in the robot system (b) The origin of UT[1] frame in the robot system is exactly at the tip of the actual pointer (c) The origin of UT[1] is aligned with the origin of Def-TCP framearrow_forwardConsider the two-link arm above that operates in the 2D plane defined by this page. Assuming: • the origin of the global frame is at the arm's anchor point with the table (thicker blue rectangle), with y-axis upwards and x-axis pointing to the right, • the arm has one motor in each joint (indexed by theta one and two as shown), the joint angles have zero angles for their respective theta when the arm is straight upwards, • the joints have limits, o the first link cannot rotate through the table (max 6, = , min 0, =), o the second link cannot rotate through the first link (max 02 = TI, min 02 = -n), collisions are not allowed (the arm cannot poke into or through the table), the tasks all involve the end-effector, that is the orange/yellow ball at the end of the %3D %3D arm, and • each "link" in the arm has length one. Write the: a) state space, b) action space, c) forward kinematics function and, d) inverse kinematics function for this robot. For spaces, use vector notation. For the…arrow_forward
- Give one example for each of lightvehicle steering and suspensionsystemshydraulic power assisted steeringadaptive suspensionfor each of the following: (5 -10words each)a. b. c.Intermittent faultsMulti-system faultsIntroduced as a result of asystem repaird.Indirect, caused by theinfluence of external systemsIn your answer, briefly explain theprocess that would be followed todiagnose the faultarrow_forwardDefine an Articulated Robot? How many joints does a 6-axis Articulated Robot have? How many joints does a Scara 4-axis robot have? # An articulated robot is a robot with rotary joints (e.g. a legged robot or an industrial robot). Articulated robots can range from simple two-jointedarrow_forwardDon't use chatgpt will upvotearrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY