
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
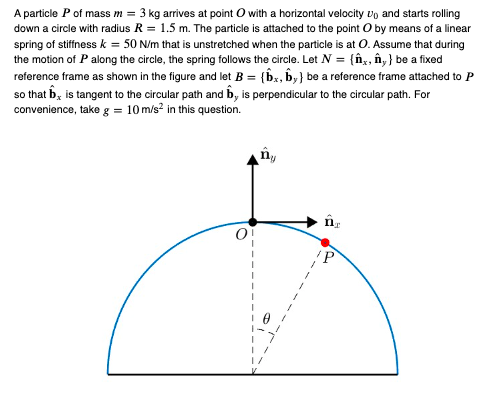

Transcribed Image Text:A particle P of mass m = 3 kg arrives at point O with a horizontal velocity and starts rolling
down a circle with radius R = 1.5 m. The particle is attached to the point O by means of a linear
spring of stiffness k = 50 N/m that is unstretched when the particle is at O. Assume that during
the motion of P along the circle, the spring follows the circle. Let N = {x, ây} be a fixed
reference frame as shown in the figure and let B = {bx, by} be a reference frame attached to P
so that b is tangent to the circular path and by is perpendicular to the circular path. For
convenience, take g = 10 m/s² in this question.
ny
ĤT
IP

Transcribed Image Text:b)
Determine for P in the frame N the position vector NP, velocity vector NP, and acceleration
vector NaP.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 3 steps with 2 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Find the constraint acceleration equation between block A and B (Assume all upper and down pulleys' centrals are horizontal).arrow_forwardP.2) The lower link of the given mecha- nism is constrained to move horizontally with a velocity VA = 10i ft/s. At the depicted instant, A is located directly beneath the fixed pivot point C, and links AB and BC are orthogonal and of equal length, "B/A = 1.2 ft. Find w and VB. B/C A OB jarrow_forward4. A stunt plane flying at the Reno Air Races is moving through the sky. The rectangular coordinates describing its motion are: x = -0.74t³ + 2.5t² + 10.25t y = -6.23t² + 16.45t + 8.94 where x and y are given in ft and t is given in seconds. a. Calculate the velocity vector, v, and acceleration, a, of the plane after 10 seconds (velocity is in ft/s and acceleration is in ft/s²). You may want to look back at your Topic 2 notes to recall how position, velocity, and acceleration are related. Your final answer should be given in vector form. b. Calculate the magnitude of the velocity (in mph) and the acceleration (in ft/s²) at t = 10 sec. [Ans. to Check: v = 132.46 mph; a = 41.32 ft/s²]arrow_forward
- The position of the EOAT (gripper hand) of the SCARA Robot in Robotics Factory in BGSU can be expressed by cylindrical coordinate system. Mechatronics student wrote a code that moves the EOAT from position P1 into position P2 at constant angular velocity of 2rad/s. The path generated between these two points, measured from base of the robot follow radial path r = cos m. Calculate the velocity magnitude of EOAT at 0 = 30°. A) 1 m/s B) 2 m/s C)2cos30 m/s D) None of the above.arrow_forward3. Write the kinematic equations for rectilinear motion for constant acceleration. a. b. C.arrow_forwardDon't Use Chat GPT Will Upvotearrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY