
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Question
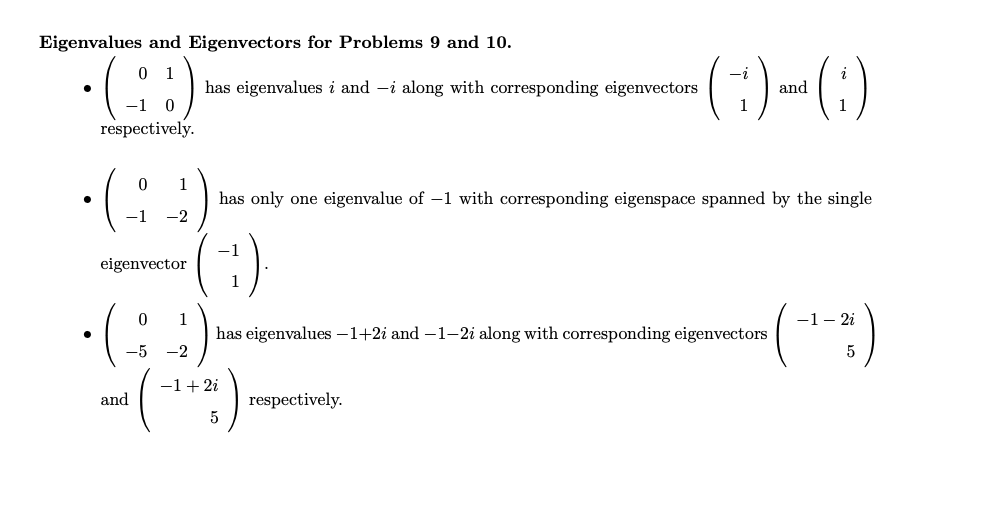

Transcribed Image Text:Eigenvalues and Eigenvectors for Problems 9 and 10.
0 1
-i
has eigenvalues i and -i along with corresponding eigenvectors
and
respectively.
(:).
1
has only one eigenvalue of –1 with corresponding eigenspace spanned by the single
-1
-2
-1
eigenvector
-1- 2i
1
has eigenvalues –1+2i and –1-2i along with corresponding eigenvectors
-5
-2
-1+ 2i
and
respectively.
5

Transcribed Image Text:Problem 9. Consider a horizontal mass-spring system with mass 10 kg and spring constant 10 N/m.
a. If the surface the mass slides on is frictionless and there are no external forces, setup and solve the
model for the position of the spring as a function of time. See the last page of this review for relevant
eigenvalues and eigenvectors.
b. Suppose the force due to friction is proportional to the velocity of the mass with proportionality constant
20 Ns/m. Setup and solve the new model for the position of the spring as a function of time. See the
last page of this review for relevant eigenvalues and eigenvectors.
c. Is the mass-spring system calculated in part b underdamped, critically damped, or overdamped? Explain
your reasoning.
d. Suppose that the proportionality constant in part b is 15 Ns/m instead. Would the new system be
underdamped, critically damped, or overdamped? Explain your reasoning.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution

Trending nowThis is a popular solution!

Step by stepSolved in 4 steps with 3 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- The physical system shown below consists of a mass, viscous damping, and two parallel springs. Do the following: a) Neatly draw a proper free body diagram b) Find the differential equation of motion that describes the system. c) Find the transfer function X(s) / F(s). x(t) ki k2 m f(t) barrow_forward3 Problem Consider the following model of a mechanical system: The system has a mass m, a linear spring with stiffness k, and two identical dampers with damping constant b. The left wall generates an input motion xin (t) that causes the mass to undergo a displacement x(t) from its equilibrium position. The initial position and velocity are zero. • Find the ODE describing the motion of the system by drawing a free-body diagram and applying Newton's 2nd Law. Your answer should be in terms of the following variables: Xin Xin, X, X, x, b,k, m Show that the transfer function is G(s) = - X(s) Xin(s) = 2b m k s+ m k s²+ + m When taking the Laplace transform L[xin(t)] you may assume the initial (input) condition Xin(0) = 0.arrow_forwardms mp mL A small frog of mass me clings to the left end of a uniform pole of mass mp and length L, and a large frog of mass my clings to the right end of the pole as shown in this top-down view. The system is rotating about its center of mass. The large frog is moving with tangential speed UL. Treat the frogs as point masses. Show all work and solve in terms of given variables. A. Find the center of mass of the system measured from the right end of the pole. B. What is the magnitude of the angular velocity of the system?arrow_forward
- Fundamental.7 deals with the equation of motion. The use of the equation of motion to solve this problem is mandatory. Solution using other approaches (conservation of energy ...) will be automatically considered false. For the problem related to Fundamental.7 sketches of the system showing: • the respective velocity and acceleration and the frame of reference considered • the forces acting on the system of considered, in other words, a free body diagram (FBD) are mandatory. Their absences will automatically make the problem false. B The pendulum bob B has a weight of 3lb and is released from rest in the position shown, 0 =0°. Determine the tension in string BC of length r = 4 ft at the instant the bob reaches point D, =4°.arrow_forwardNeeds Complete typed solution with 100 % accuracy.arrow_forwarddiagram, F, is the input force exerted on the cart by the voltage applied to the motor, m, is the mass of the cart. The encoder is used to keep track of the position of the cart on the track. Cart Encoder Mater March 7, 2023 Track X Figure 5: Free body diagram of the cart (ignoring friction) Using Figure 5 and basic Newtonian dynamics you can derive the equations governing the system. 3.3 Motor Dynamics The input to your system is actually a voltage to the cart's motor. Thus, you need to derive the dynamics of the system that converts the input voltage to the foren exertal on the cart. These are the dynamics of the motor. Figure 6 shows a diagram of the electrical components of the motor. Figure 6: Clasic armature circuit of a standard DC motor For this derivation of the motor dynamics we assume the following: • We disregard the motor inductance: IR, so we can use the approximation 0. • Perfect efficiency of the motor and gearbox: -- 1. The torque generated by the motor is proportional…arrow_forward
- The ideal gas law, discovered experimentally, is an equation of state that relates the observable state variables of the gas--pressure, temperature, and density (or quantity per volume): PV = NkBT (or pV = nRT), Figure L₂ Lx 1 of 1 Part A Find the magnitude of the average force (F) in the x direction that the particle exerts on the right-hand wall of the container as it bounces back and forth. Assume that collisions between the wall and particle are elastic and that the position of the container is fixed. Be careful of the sign of your answer. Express the magnitude of the average force in terms of m, vr, and L₂. ► View Available Hint(s) Submit Part B IVE ΑΣΦ ? Imagine that the container from the problem introduction is now filled with N identical gas particles of mass m. The particles each have different x velocities. but their average x velocity squared. denotedarrow_forwardData has been gathered from a lifting system used to transport engine parts. The system consists of a drum and cable. The following data was obtained when the drum lowers the load (assume constant acceleration). Drum diameter = 0.8m Mass of load = 3kg Initial velocity = 0 m/s Time to descend = 0.5 secs Distance travelled = 0.25m You have been asked to use this information to determine: The final linear velocity of the load The linear acceleration of the load The final angular velocity of the drum The angular acceleration of the drum The tension force in the cable The torque applied to the drum In determining the above quantities, you should clearly state the formulae used and apply dimensional analysis techniques to show that all values/units used are homogeneous. From the formulae used (above) you should apply dimensional analysis techniques to develop two equations for power (in terms of linear velocity and angular velocity).arrow_forwardMultiple DOF SystemsA 2-D spring-mass, frictionless system has the following parameters:m1 = 72m2 = 27k1 = 381k2 = 183x1,0 = 0 mx2,0 = 1 mv1,0 = -1 m/sv2,0 = 0 m/s In MATLAB, solve numerically for x1(t) and x2(t).arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY