
Advanced Engineering Mathematics
10th Edition
ISBN: 9780470458365
Author: Erwin Kreyszig
Publisher: Wiley, John & Sons, Incorporated
expand_more
expand_more
format_list_bulleted
Related questions
Question
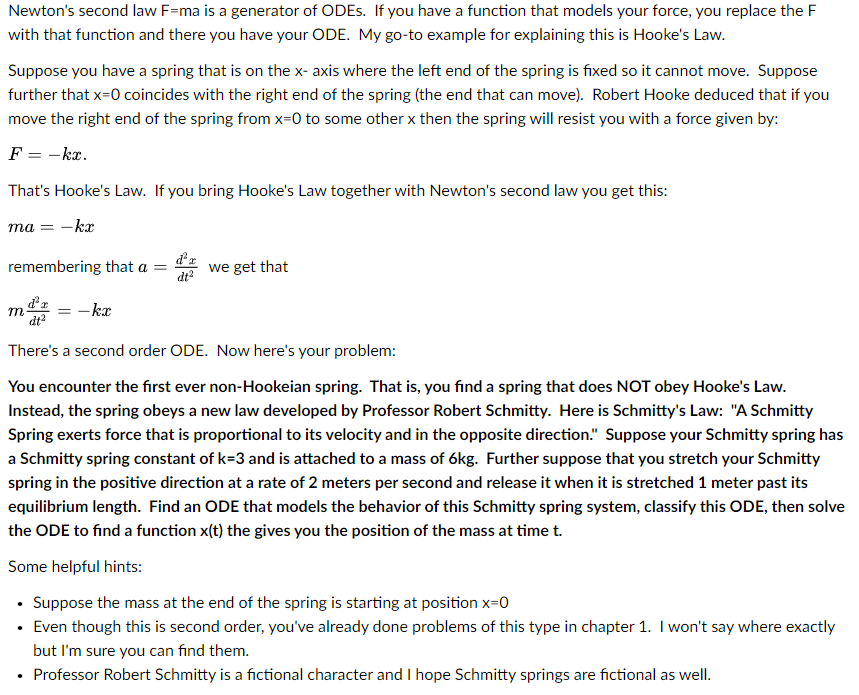

Transcribed Image Text:Newton's second law F=ma is a generator of ODES. If you have a function that models your force, you replace the F
with that function and there you have your ODE. My go-to example for explaining this is Hooke's Law.
Suppose you have a spring that is on the x- axis where the left end of the spring is fixed so it cannot move. Suppose
further that x=0 coincides with the right end of the spring (the end that can move). Robert Hooke deduced that if you
move the right end of the spring from x=0 to some other x then the spring will resist you with a force given by:
F = -kx.
That's Hooke's Law. If you bring Hooke's Law together with Newton's second law you get this:
ma = -kx
remembering that a =
m
d'r
= -kx
dt²
we get that
There's a second order ODE. Now here's your problem:
You encounter the first ever non-Hookeian spring. That is, you find a spring that does NOT obey Hooke's Law.
Instead, the spring obeys a new law developed by Professor Robert Schmitty. Here is Schmitty's Law: "A Schmitty
Spring exerts force that is proportional to its velocity and in the opposite direction." Suppose your Schmitty spring has
a Schmitty spring constant of k=3 and is attached to a mass of 6kg. Further suppose that you stretch your Schmitty
spring in the positive direction at a rate of 2 meters per second and release it when it is stretched 1 meter past its
equilibrium length. Find an ODE that models the behavior of this Schmitty spring system, classify this ODE, then solve
the ODE to find a function x(t) the gives you the position of the mass at time t.
Some helpful hints:
• Suppose the mass at the end of the spring is starting at position x=0
• Even though this is second order, you've already done problems of this type in chapter 1. I won't say where exactly
but I'm sure you can find them.
• Professor Robert Schmitty is a fictional character and I hope Schmitty springs are fictional as well.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 2 images

Knowledge Booster

Recommended textbooks for you
- Advanced Engineering MathematicsAdvanced MathISBN:9780470458365Author:Erwin KreyszigPublisher:Wiley, John & Sons, Incorporated
 Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education
Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY
Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY  Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,

Advanced Engineering Mathematics
Advanced Math
ISBN:9780470458365
Author:Erwin Kreyszig
Publisher:Wiley, John & Sons, Incorporated
Numerical Methods for Engineers
Advanced Math
ISBN:9780073397924
Author:Steven C. Chapra Dr., Raymond P. Canale
Publisher:McGraw-Hill Education
Introductory Mathematics for Engineering Applicat...
Advanced Math
ISBN:9781118141809
Author:Nathan Klingbeil
Publisher:WILEY
Mathematics For Machine Technology
Advanced Math
ISBN:9781337798310
Author:Peterson, John.
Publisher:Cengage Learning,