
Advanced Engineering Mathematics
10th Edition
ISBN: 9780470458365
Author: Erwin Kreyszig
Publisher: Wiley, John & Sons, Incorporated
expand_more
expand_more
format_list_bulleted
Related questions
Question
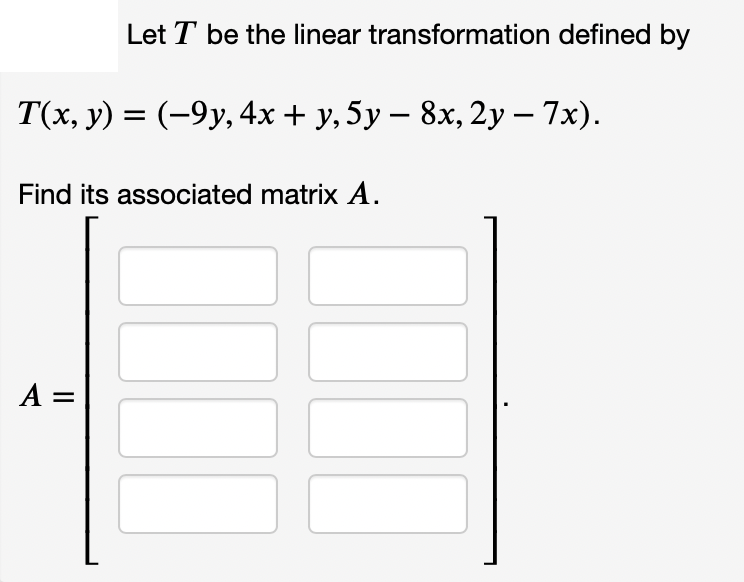

Transcribed Image Text:Let T be the linear transformation defined by
T(x, y) = (-9y,4x + y, 5y – 8x, 2y – 7x).
Find its associated matrix A.
A =
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 2 images

Knowledge Booster

Similar questions
- HANAN TE The cross product of two vectors in R3 is defined by bi 6-8-6 a2b3-a3b2 a2 Xb2 azbı - a1b3 La1b2-a2b1 b3 L-₁ Let = 3. Find the matrix A of the linear transformation from R³ to R³ given by T(x) = xX. A = al a3arrow_forwardCalculate 121x dxdy where R is the parallelogram with vertices (0,0), (6,2), (7,6) R 1 -(v — Зи), у 11 -(4v – u) 11 and (1,4) using the transformation x =arrow_forwardLet T be the linear transformation defined by T(1, 2, 3, 4, 5) = −9x1 + 7x2 + 4x3 + 6x4 + 8x5. Its associated matrix A is a matrix.arrow_forward
- Let A be an m x n matrix and let b and c be column vectors with n components. Express the dot product (Ab) * (Ac) as a product of matrices.arrow_forwardConstruct a 4×3 matrix A and vectors ~b and ~c in R4 so that ~b is in the range ofthe linear transformation with standard matrix A but ~c is not.arrow_forwardFind the Jacobian of the transformation = 3u + 7v, y = u² - - v.arrow_forward
- Let's create a matrix that reflects around a line that is perpendicular to the vector n = [0.375, 0.927] in 2D, this line passes though the origin. Now that you have both rows, what is the image of the point (1, 2) under this transformation? Enter the x-coordinate, round it to 3 decimal places.arrow_forwardConsider the matrix A = a1 a12 a13 a14 24, show that the product L(x)=Ai is a linear transformation, where žER“.arrow_forwardFind the image of the point (x, y) under the matrix transformation that first reflects the point with respect to the x-axis, then rotates the resulting point about the origin through an angle of T/3, and then reflects the resulting point with respect to the line y = x.arrow_forward
- Let = A = - = The cross product of two vectors in R³ is defined by a1 a2 az X b₁ b₂ b3 = 0 E] 7 Find the matrix A of the linear transformation from R³ to R³ given by T(x) = V × ã. [a₂b3-a3b₂ a3b₁a₁b3 [a₁b₂-a₂b₁]arrow_forwardFind the standard matrix for the linear transformation T(1, 9) — (2а — Зу, т — у, у — 4г) -3 1 -1 1 1 -4 2 1 -4 -3 -1 1 -3 -1 2 1 1 -3 -1 2.arrow_forwardLet S be a linear transformation from R³ to R² with associated matrix Let T be a linear transformation from R² to R² with associated matrix Determine the matrix C of the composition To S. C= 2 4-843 3]. A = B = 2 21.arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Advanced Engineering MathematicsAdvanced MathISBN:9780470458365Author:Erwin KreyszigPublisher:Wiley, John & Sons, Incorporated
 Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education
Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY
Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY  Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,

Advanced Engineering Mathematics
Advanced Math
ISBN:9780470458365
Author:Erwin Kreyszig
Publisher:Wiley, John & Sons, Incorporated
Numerical Methods for Engineers
Advanced Math
ISBN:9780073397924
Author:Steven C. Chapra Dr., Raymond P. Canale
Publisher:McGraw-Hill Education
Introductory Mathematics for Engineering Applicat...
Advanced Math
ISBN:9781118141809
Author:Nathan Klingbeil
Publisher:WILEY
Mathematics For Machine Technology
Advanced Math
ISBN:9781337798310
Author:Peterson, John.
Publisher:Cengage Learning,