
Database System Concepts
7th Edition
ISBN: 9780078022159
Author: Abraham Silberschatz Professor, Henry F. Korth, S. Sudarshan
Publisher: McGraw-Hill Education
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
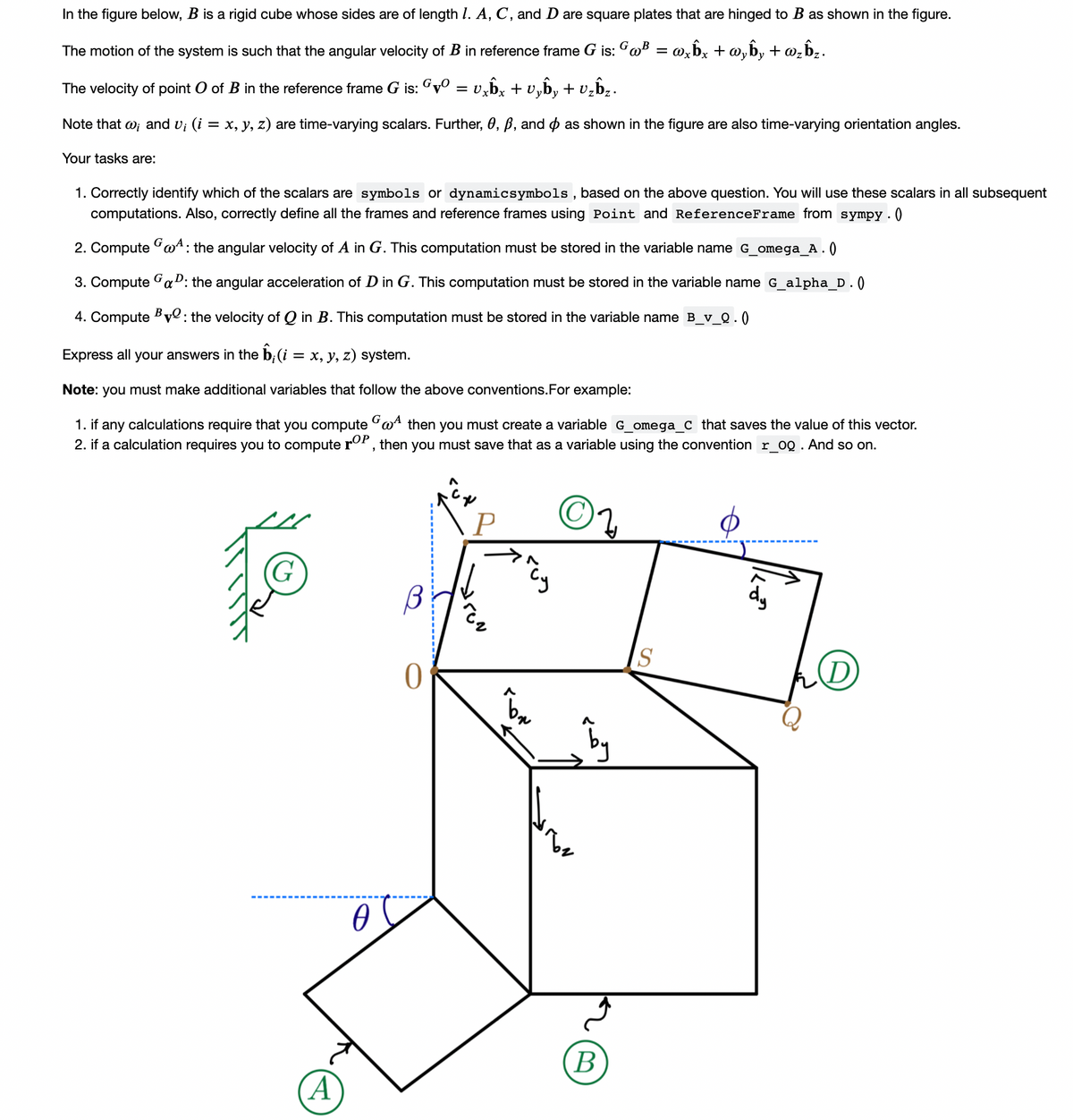

Transcribed Image Text:In the figure below, B is a rigid cube whose sides are of length I. A, C, and D are square plates that are hinged to B as shown in the figure.
The motion of the system is such that the angular velocity of B in reference frame G is: CoB = wzb, + @,b, + w,bz.
Wy
The velocity of point O of B in the reference frame G is: Gv° = vxbx + v „b, + v̟b,.
yDy
Note that w; and v; (i = x, y, z) are time-varying scalars. Further, 0, B, and o as shown in the figure are also time-varying orientation angles.
Your tasks are:
1. Correctly identify which of the scalars are symbols or dynamicsymbols , based on the above question. You will use these scalars in all subsequent
computations. Also, correctly define all the frames and reference frames using Point and ReferenceFrame from sympy. 0
2. Compute "wª: the angular velocity of A in G. This computation must be stored in the variable name G_omega_A. ()
3. Compute CaD: the angular acceleration of D in G. This computation must be stored in the variable name G_alpha_D. ()
4. Compute Bve: the velocity of Q in B. This computation must be stored in the variable name B_v_Q. 0
Express all your answers in the b; (i
= x, y, z) system.
Note: you must make additional variables that follow the above conventions.For example:
1. if any calculations require that you compute "w4 then you must create a variable G omega C that saves the value of this vector.
2. if a calculation requires you to compute roP, then you must save that as a variable using the convention r oQ . And so on.
P
Cy
dy
S
(D
B
(A
![In the below cell, we have imported all the functions you will need to complete this assignment; note that you can not modify this cell.
In [ ]:
from sympy import symbols, sin, cos, Matrix
from sympy.physics.mechanics import dynamicsymbols, ReferenceFrame, Point, init_vprinting
init_vprinting()
QUESTION 1: Update constant and time-varying scalars; create reference
frames and points in figure
You are provided the code in the cells below that define all the scalar variables as symbols . Based on the problem statement above, please modify the lines
in this first code cell to correctly identify the scalar variables as constants or time-varying using either symbols or dynamicsymbols .
Also, in this cell, create all reference frames and points from the figure above using ReferenceFrame and Point.
In [ ]: 1 = symbols ('l')
theta, beta, phi
symbols ( 'theta, beta, phi')
symbols ('omega_x, omega_y, omega_z')
omega_x, omega_y, omega_z =
v_x, v_y, v_z = symbols('v_x, v_y, v_z')
# YOUR CODE HERE
In [ ]: # For your solutions
In [ ]: # For your solutions
In [ ]: # For your solutions (add more cells direcly below this one if needed)](https://content.bartleby.com/qna-images/question/c4205fce-0b4d-4640-b3f9-45e32a33cf84/2e63c033-4fd5-4bd9-8d08-cca3f8a1c606/asdme0n_processed.png)
Transcribed Image Text:In the below cell, we have imported all the functions you will need to complete this assignment; note that you can not modify this cell.
In [ ]:
from sympy import symbols, sin, cos, Matrix
from sympy.physics.mechanics import dynamicsymbols, ReferenceFrame, Point, init_vprinting
init_vprinting()
QUESTION 1: Update constant and time-varying scalars; create reference
frames and points in figure
You are provided the code in the cells below that define all the scalar variables as symbols . Based on the problem statement above, please modify the lines
in this first code cell to correctly identify the scalar variables as constants or time-varying using either symbols or dynamicsymbols .
Also, in this cell, create all reference frames and points from the figure above using ReferenceFrame and Point.
In [ ]: 1 = symbols ('l')
theta, beta, phi
symbols ( 'theta, beta, phi')
symbols ('omega_x, omega_y, omega_z')
omega_x, omega_y, omega_z =
v_x, v_y, v_z = symbols('v_x, v_y, v_z')
# YOUR CODE HERE
In [ ]: # For your solutions
In [ ]: # For your solutions
In [ ]: # For your solutions (add more cells direcly below this one if needed)
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 1 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, computer-science and related others by exploring similar questions and additional content below.Similar questions
- You are given an array-like data structure Listy which lacks a size method. It does, however, have an elementAt ( i) method that returns the element at index i in 0( 1) time. If i is beyond the bounds of the data structure, it returns -1. (For this reason, the data structure only supports positive integers.) Given a Listy which contains sorted, positive integers, find the index at which an element x occurs. If x occurs multiple times, you may return any index. Write code with explanationarrow_forwardAccess PyCharm. Then, demonstrate how to work with the complex objects as outlined below. Take appropriate screenshots (with descriptions) as needed. Create functions that take five arguments and multiplies them according to the type of object they are: Scalar Vector Matrix Plot each of the functions that you have constructed.arrow_forwardWithout importing any Lib:arrow_forward
- 1. Create a UML using the UML Template attached. 2. In this lab, you will be creating a roulette wheel. The pockets are numbered from 0 to 36. The colors of the pockets are as follows: Pocket 0 is green. For pockets 1 through 10, the odd-numbered pockets are red and the even-numbered pockets are black. For pockets 11 through 18, the odd-numbered pockets are black and the even-numbered pockets are red. For pockets 19 through 28, the odd-numbered pockets are red and the even-numbered pockets are black. For pockets 29 through 36, the odd-numbered pockets are black and the even-numbered pockets are red. Create a class named RoulettePocket. The class's constructor should accept a pocket number. The class should have a method named getPocketColor that returns the pocket's color, as a string. Demonstrate the class in a program that asks the user to enter a pocket number, and displays whether the pocket is green, red, or black. The program should display an error message if the user…arrow_forward---for example, Data abstraction is a powerful concept in computer science that allows programmers to treat code as objects car objects, chair objects, people objects, etc. That way, programmers don't have to worry about how code is implemented they just have to know what it does. Data abstraction mimics how we think about the world. For example, when you want to drive a car, you don't need to know how the engine was built or what kind of material the tires are made of. You just have to know how to turn the wheel and press the gas pedal. An abstract data type consists of two types of functions: • Constructors: functions that build the abstract data type. • Selectors: functions that retrieve information from the data type. For example, say we have an abstract data type called city. This city object will hold the city's name, and its latitude and longitude. To create a city object, you'd use a constructor like city=make_city (name, lat, lon) To extract the information of a city object,…arrow_forwardplease include a picture of the program and the output too and thank you!!!arrow_forward
- Add the function min as an abstract function to the class arrayListType to return the smallest element of the list. Also, write the definition of the function min in the class unorderedArrayListType and write a program to test this function. I have 5 tabs: I have tried every solution I can think of with no luck. These are the guides: arrayListType.h arrayListTypeImp.cpp: main.cpp unorderedArraryListType.h unorderedArrayListTypeImp.cpp I am needing these in order to pass the assignment in Cengage Mindtap, please help with codes for each one if possible.arrow_forwardplease code in pythonBuild the pipeline that uses a Principal Component Analysis (PCA) model to extract 2 principal components of the training set and create a a KMeans model (same as the model in 3A). Fill in the myPCAKMeans function, which accepts as input the training set and returns a fully trained model. Below is the template def myPCAKMeans(Xtrain, ytrain): #write function here return myPCAKMeansModel You can use any sample dataarrow_forwardIn Checkpoint B, the game will be playable as a two-player game, albeit the competition will be a computer player who makes moves randomly. Implement these functions from the template following the description (specification) in their docstring: shuffle() replace_deck() deal_initial_hands() play_hand() should be extended to support 'random' mode The main function to drive the game has been provided. In 'interactive' mode, play_hand() should behave the same way as in Part A In 'random' mode, the computer selects actions randomly. Compared to 'interactive' mode: Every call to input() for the player should be replaced with a random choice Extra printed feedback for the player should be omitted For testing, we have hard-coded the seed 26 for the random source Hint: you can use random.randint(x, y) to select a number between x and y, inclusive. In particular, "flipping a coin" would be accomplished via random.randint(0, 1) Sample input/output When the inputs are: yes 1 no yes 9 The…arrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Database System ConceptsComputer ScienceISBN:9780078022159Author:Abraham Silberschatz Professor, Henry F. Korth, S. SudarshanPublisher:McGraw-Hill Education
 Starting Out with Python (4th Edition)Computer ScienceISBN:9780134444321Author:Tony GaddisPublisher:PEARSON
Starting Out with Python (4th Edition)Computer ScienceISBN:9780134444321Author:Tony GaddisPublisher:PEARSON Digital Fundamentals (11th Edition)Computer ScienceISBN:9780132737968Author:Thomas L. FloydPublisher:PEARSON
Digital Fundamentals (11th Edition)Computer ScienceISBN:9780132737968Author:Thomas L. FloydPublisher:PEARSON  C How to Program (8th Edition)Computer ScienceISBN:9780133976892Author:Paul J. Deitel, Harvey DeitelPublisher:PEARSON
C How to Program (8th Edition)Computer ScienceISBN:9780133976892Author:Paul J. Deitel, Harvey DeitelPublisher:PEARSON Database Systems: Design, Implementation, & Manag...Computer ScienceISBN:9781337627900Author:Carlos Coronel, Steven MorrisPublisher:Cengage Learning
Database Systems: Design, Implementation, & Manag...Computer ScienceISBN:9781337627900Author:Carlos Coronel, Steven MorrisPublisher:Cengage Learning Programmable Logic ControllersComputer ScienceISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Programmable Logic ControllersComputer ScienceISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Database System Concepts
Computer Science
ISBN:9780078022159
Author:Abraham Silberschatz Professor, Henry F. Korth, S. Sudarshan
Publisher:McGraw-Hill Education
Starting Out with Python (4th Edition)
Computer Science
ISBN:9780134444321
Author:Tony Gaddis
Publisher:PEARSON
Digital Fundamentals (11th Edition)
Computer Science
ISBN:9780132737968
Author:Thomas L. Floyd
Publisher:PEARSON
C How to Program (8th Edition)
Computer Science
ISBN:9780133976892
Author:Paul J. Deitel, Harvey Deitel
Publisher:PEARSON
Database Systems: Design, Implementation, & Manag...
Computer Science
ISBN:9781337627900
Author:Carlos Coronel, Steven Morris
Publisher:Cengage Learning
Programmable Logic Controllers
Computer Science
ISBN:9780073373843
Author:Frank D. Petruzella
Publisher:McGraw-Hill Education