
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Question
Please give some idea.
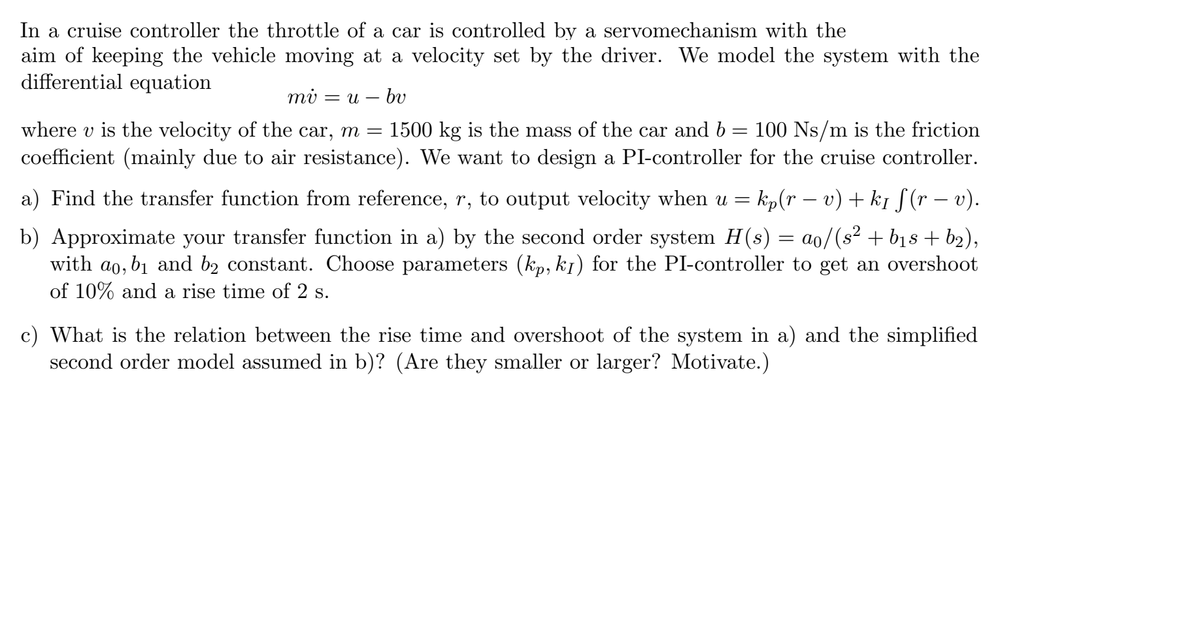

Transcribed Image Text:In a cruise controller the throttle of a car is controlled by a servomechanism with the
aim of keeping the vehicle moving at a velocity set by the driver. We model the system with the
differential equation
mi u bv
where u is the velocity of the car, m = 1500 kg is the mass of the car and b = 100 Ns/m is the friction
coefficient (mainly due to air resistance). We want to design a PI-controller for the cruise controller.
a) Find the transfer function from reference, r, to output velocity when u = kp(r − v) + kï ſ (r — v).
b) Approximate your transfer function in a) by the second order system H(s) = ao/(s² + b₁s + b2),
with ao, b₁ and b2 constant. Choose parameters (kp, ki) for the PI-controller to get an overshoot
of 10% and a rise time of 2 s.
c) What is the relation between the rise time and overshoot of the system in a) and the simplified
second order model assumed in b)? (Are they smaller or larger? Motivate.)
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 4 steps with 9 images

Knowledge Booster

Similar questions
- How does the tension in the string change as the masses start to move? Or does it?arrow_forwardI need answers for problems 7, 8, and 9 pertaining to the print provided.arrow_forwardWhat term describes a numerical value that can be applied to a dimensional constraint in a technical drawing that will restrict variation on a part feature yet keep part feature functionality? Please answer quicklyarrow_forward
- Hello, I need your help. Topics: Force System of a Force, Moment of a Force, Moment of a Force-Scalar Formulation, Moment of a Force-Vector Formulation, and Principle of Moment. Note: Kindly show the complete step-by-step solution. Please make sure that your handwriting is understandable and the picture of the solution is clear. I will rate you with “like/upvote” after. Thank you so much.arrow_forwardSelect the correct statements regarding the addition of moments. (Select 3) Moments have directions, so a negative value implies it is along the opposite direction from the reference direction. All the moments need to have the same reference point/pivot in order to add together. Calculate each moment by multiplying each force with its distance to the reference point, and add all values together, regardless of their direction. You have to define the reference direction first, either clockwise or counter-clockwise.arrow_forwardI asked for problems 6 and 7 to be answered, but I did not get a properly structured answered as the example shows on problem number 1. Here is the link to the questions I already had answered, could you please rewrite the answer so its properly answered as the example shows (Problem 1)? https://www.bartleby.com/questions-and-answers/it-vivch-print-reading-for-industry-228-class-date-name-review-activity-112-for-each-local-note-or-c/cadc3f7b-2c2f-4471-842b-5a84bf505857arrow_forward
- Statics of Rigid Bodies Note: If you have already answered the problems in this post, kindly ignore it. If not, then answer it. Thank you, Tutor! Content Covered: - Method of Joints Direction: Create two problems based on the topic "Method of Joints" and then solve them with a complete solution. In return, I will give you a good rating. Thank you so much! Note: Please bear in mind to create two problems based on the topic "Method of Joints." Be careful with the calculations in the problem. Kindly double check the solution and answer if there is a deficiency. And also, box the final answer. Thank you so much!arrow_forwardIt is still saying that is not correct. I have tried this practice problem over and over and that is the only part that it keeps saying is incorrect. the negative and units are correct. I appreciate your help.arrow_forwardSolidworksarrow_forward
- Can some one please help to solve this question following the directions and showing neat work and formulas. PLEASE AND THANK YOU!!!arrow_forwardPlease show work for all these answers and a clear and short explantion of each onearrow_forwardNote: please show step by step solution. Hence, double check the solution. For correction purposes!. I require handwritten working out please!. Kindly, please meticulously, check the image for conceptual understanding and for extra information purposes!. Also on occasions, I receive wrong answers!!. Please go through the question and working out step by step when you finish them. Appreciate your time!.arrow_forward
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY