
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Question
what is the number of degree of freedom.?? all nb of degree regle with explain and what is the character of assembly like the picture below very urgent with explain the type of all in briefly
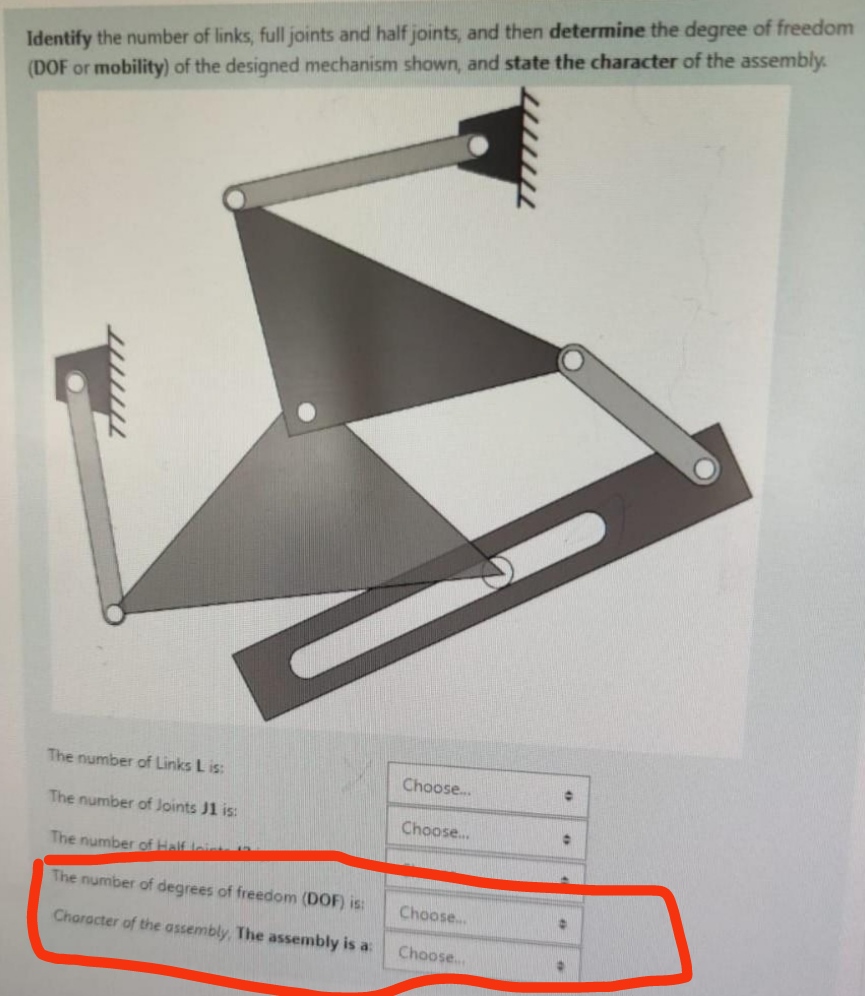

Transcribed Image Text:Identify the number of links, full joints and half joints, and then determine the degree of freedom
(DOF or mobility) of the designed mechanism shown, and state the character of the assembly.
The number of Links L is:
The number of Joints J1 is:
Choose...
Choose...
The number of Half lin
The number of degrees of freedom (DOF) is:
Choose...
Character of the assembly, The assembly is a:
Choose...
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 1 images

Knowledge Booster

Similar questions
- Please assist with this practice question. Thank you. Explain in detail please.arrow_forwardNeed valid explaination (neat and clean handwritten solution).. I will upvote if you fulfilled all criterion stated above. THANKS. Don't give copied answer.arrow_forwardThe data previously that i get is :- a) DOF = 1 b) Length, Z = 181.94 mm c) Transmission angle = 72 degree d) ? Can answer for part D? I need the answer for part D only.arrow_forward
- What would the value of c_1 and c_2 be?arrow_forwardDefine an Articulated Robot? How many joints does a 6-axis Articulated Robot have? How many joints does a Scara 4-axis robot have? # An articulated robot is a robot with rotary joints (e.g. a legged robot or an industrial robot). Articulated robots can range from simple two-jointedarrow_forwardEvaluate the 3-DOF wrist as shown in Figure 2, use the conventional method to determine 1. Linear velocity and 2. Angular velocity NOTE: for JOINT 3 ( 03 ) only Connected to robot arm Pitch Roll Yaw Figure 2: Wrist assembly The known position and orientation of the end of the arm point is. C, C2 [-C,S2C3 + S¼S3 -S;S2C3 – C1S3 C2C3 C¡S2S3 + S1C3 S4S2S3 + C,C3 -C2S3 01 S,C2 S2 1 °T3=°T¡'T2²T3arrow_forward
- How many possible gaits (distinct combinations of lift/release events) can a 4 legged robot like the Aibo produce?arrow_forwarda) Figure Q3a shows a stage 1 to stage 2 compound gear train through from Gears A, B, C to D. If the input shaft rotates at 1300 revolutions per minute (rpm), calculate the angular velocity (w) in rad/s at the output shaft of the compound gear train. See below for the number of teeth for Gears A, B, C & D. [10 marks] Gear A: 44 Teeth Gear B: 96 Teeth Gear C: 60 Teeth Gear D: 140 Teeth Gear B- -Stage 2 Gear A- Input shaft- Stage 1- Gear C- -Gear D -Intermediate shaft -Output shaft Figure Q3a b) A motor with a power rating of 3600 Watts is coupled to the input shaft of the pinion (or driver) Gear A as shown in Figure Q3a. Calculate the torque at the input shaft and at the output shaft. Assume no losses and 100% efficiency. [5 marks] c) Draw a typical indicator diagram of pressure versus volume (p-v) to illustrate the actual Otto cycle for a four-stroke reciprocating internal combustion [RIC] engine. Clearly label each part of the p-v indicator diagram and clearly indicate when the piston…arrow_forwardDesign a Geneva Mechanism for an eight station automated tables. The indexer diameter is set to 36 in and the station cycle time is 40s. Show both the design drawing and calculationsarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY