
Advanced Engineering Mathematics
10th Edition
ISBN: 9780470458365
Author: Erwin Kreyszig
Publisher: Wiley, John & Sons, Incorporated
expand_more
expand_more
format_list_bulleted
Related questions
Question
Please do part A and B and please show step by step and explain
![(a) Draw a set of \( x, y, \) and \( z \) axes so that the vectors \([1, 0, 0]^T, [0, 1, 0]^T, [0, 0, 1]^T\) form a right-handed system.
(b) Draw a set of \( x, y, \) and \( z \) axes so that the vectors \([1, 0, 0]^T, [0, 1, 0]^T, [0, 0, 1]^T\) form a left-handed system.](https://content.bartleby.com/qna-images/question/892e817a-9b32-4eeb-b8fc-5dd7ffde6479/de40621c-3248-4d16-8d56-4e099fdb9551/poylg69_processed.png)

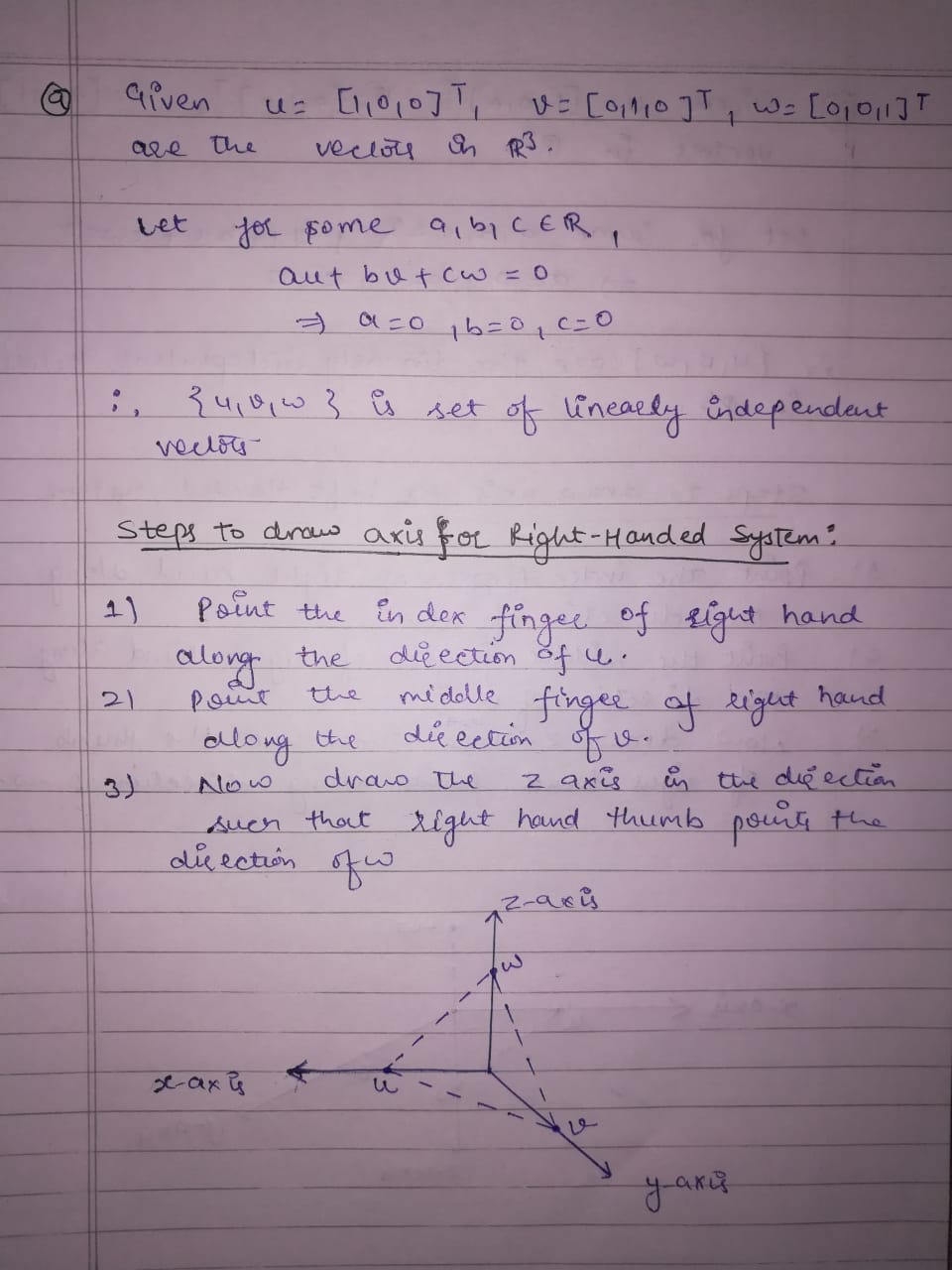
Transcribed Image Text:(a) Draw a set of \( x, y, \) and \( z \) axes so that the vectors \([1, 0, 0]^T, [0, 1, 0]^T, [0, 0, 1]^T\) form a right-handed system.
(b) Draw a set of \( x, y, \) and \( z \) axes so that the vectors \([1, 0, 0]^T, [0, 1, 0]^T, [0, 0, 1]^T\) form a left-handed system.
![Any \(3 \times 3\) matrix \(A\) produces a function from three-dimensional space to itself as follows: given any vector \(\mathbf{v} = [v_1, v_2, v_3]^T\), then the image vector is \(A\mathbf{v}\). Using summation notation, we may write:
\[
[A\mathbf{v}]_i = \sum_j A_{ij}v_j.
\]
Now, whenever we move an object in space, to get the new locations of various points on the object we have to define a function whose domain and codomain are subsets of \(\mathbb{R}^3\). If that object is a rigid sphere (like the earth), and the motion is such that the center of the sphere does not change, the motion is called a rotation. The function that describes a rotation in \(\mathbb{R}^3\) can actually be expressed as a matrix as described above. But not all \(3 \times 3\) matrices are rotation matrices. They must have some particular mathematical properties, as described in the next two paragraphs.
First, a rotation matrix \(R\) must preserve lengths and angles. In other words, if \(\mathbf{v}\) and \(\mathbf{w}\) are any two 3-d vectors , then \(\|R\mathbf{v}\| = \|\mathbf{v}\|\), \(\|R\mathbf{w}\| = \|\mathbf{w}\|\), and furthermore the angle between \(R\mathbf{v}\) and \(R\mathbf{w}\) must be the same as the angle between \(\mathbf{v}\) and \(\mathbf{w}\). In view of the cosine formula, this means that the dot product must be preserved: \(R\mathbf{v} \cdot R\mathbf{w} = \mathbf{v} \cdot \mathbf{w}\). In fact, since vector length is the square root of a dot product, all of these conditions will be satisfied as long as
\[
R\mathbf{v} = \mathbf{v} \cdot \mathbf{w}
\]
for any two 3-d vectors \(\mathbf{v}\) and \(\mathbf{w}\).
Another important property of rotation matrices is that they preserve handedness. Handed](https://content.bartleby.com/qna-images/question/892e817a-9b32-4eeb-b8fc-5dd7ffde6479/de40621c-3248-4d16-8d56-4e099fdb9551/0nttpxa_processed.png)
Transcribed Image Text:Any \(3 \times 3\) matrix \(A\) produces a function from three-dimensional space to itself as follows: given any vector \(\mathbf{v} = [v_1, v_2, v_3]^T\), then the image vector is \(A\mathbf{v}\). Using summation notation, we may write:
\[
[A\mathbf{v}]_i = \sum_j A_{ij}v_j.
\]
Now, whenever we move an object in space, to get the new locations of various points on the object we have to define a function whose domain and codomain are subsets of \(\mathbb{R}^3\). If that object is a rigid sphere (like the earth), and the motion is such that the center of the sphere does not change, the motion is called a rotation. The function that describes a rotation in \(\mathbb{R}^3\) can actually be expressed as a matrix as described above. But not all \(3 \times 3\) matrices are rotation matrices. They must have some particular mathematical properties, as described in the next two paragraphs.
First, a rotation matrix \(R\) must preserve lengths and angles. In other words, if \(\mathbf{v}\) and \(\mathbf{w}\) are any two 3-d vectors , then \(\|R\mathbf{v}\| = \|\mathbf{v}\|\), \(\|R\mathbf{w}\| = \|\mathbf{w}\|\), and furthermore the angle between \(R\mathbf{v}\) and \(R\mathbf{w}\) must be the same as the angle between \(\mathbf{v}\) and \(\mathbf{w}\). In view of the cosine formula, this means that the dot product must be preserved: \(R\mathbf{v} \cdot R\mathbf{w} = \mathbf{v} \cdot \mathbf{w}\). In fact, since vector length is the square root of a dot product, all of these conditions will be satisfied as long as
\[
R\mathbf{v} = \mathbf{v} \cdot \mathbf{w}
\]
for any two 3-d vectors \(\mathbf{v}\) and \(\mathbf{w}\).
Another important property of rotation matrices is that they preserve handedness. Handed
Expert Solution
arrow_forward
Step 1

Step by stepSolved in 2 steps with 2 images

Knowledge Booster

Similar questions
arrow_back_ios
arrow_forward_ios
Recommended textbooks for you
- Advanced Engineering MathematicsAdvanced MathISBN:9780470458365Author:Erwin KreyszigPublisher:Wiley, John & Sons, Incorporated
 Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education
Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY
Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY  Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,

Advanced Engineering Mathematics
Advanced Math
ISBN:9780470458365
Author:Erwin Kreyszig
Publisher:Wiley, John & Sons, Incorporated
Numerical Methods for Engineers
Advanced Math
ISBN:9780073397924
Author:Steven C. Chapra Dr., Raymond P. Canale
Publisher:McGraw-Hill Education
Introductory Mathematics for Engineering Applicat...
Advanced Math
ISBN:9781118141809
Author:Nathan Klingbeil
Publisher:WILEY
Mathematics For Machine Technology
Advanced Math
ISBN:9781337798310
Author:Peterson, John.
Publisher:Cengage Learning,