
Related questions
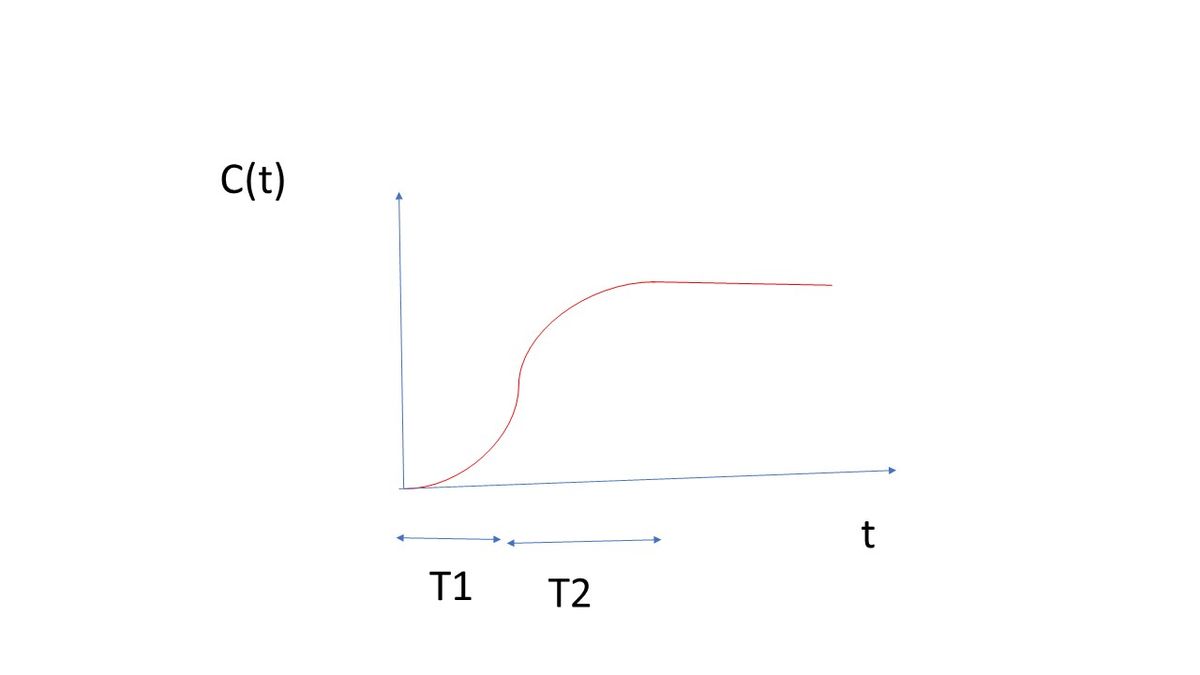
The physical systems existing in our process industries have their dynamic response, represented by variations of control signals over time based on given input signals. Regarding an impulse input for a system that does not have complex poles, the time response can be characterized as illustrated in the figure below. Therefore, it is correct to state that:
alternatives:
a)The time response of physical systems cannot be described graphically.
b) Time is a response that the process operator perceives, and this is not a characteristic of physical systems.
c) The system's response does not depend on time, but on the characteristics of the raw materials and their quantities.
d) The response curve of a system cannot describe its characteristics.
e) The curve indicated in the figure represents two time constants, the first (t1) being a delay time constant.


Step by stepSolved in 2 steps


- 2. Consider the circuit is shown in the figure below. The circuit comprises a voltage supply, v(t), resistor (R), inductor (L) and capacitor (C). Let x1=i and x2= v. be the state variables for this system, where i and v.are the circuit current and capacitor voltage, respectively. For this system, a) Derive the loop equation, involving integro-differential equations, from first principles Write the state differential equations b) c) Write the state-space equation in matrix-vector form d) Sketch the signal-flow graph. Show all your work. Rarrow_forwardThe voltage impulse response of a circuit is shown below in figure (a). The input signal to the circuit is therectangular voltage pulse shown in figure (b).a. Derive the equations for the output voltage. Note the range of time for which each equation isapplicable.b. Sketch the output for 0 ≤ t ≤ 27s Please do my graphical Method. Earlier I got an answer without the graphical methodarrow_forwardQUESTION 1. A discrete-time Linear Time-Invariant system defined by its input-output relationship is given as y[n] = 2x[n – 4] – 3x[n – 6] where x[n] and y[n] are the input and output signals respectively. a) Give the definition of system impulse response and compute h[n]. b) Show that this system is causal using h[n]. c) Show that if this system is BIBO stable using h[n]. d) Compute the z-domain transfer function H(z). Determine the poles and zeros, and find the ROC. e) Determine if this system is stable using H(z). f) Explain the reasons that the system frequency response H(e]®) can be found. Find the frequency response. g) Find the system impulse response h[n] by taking the Inverse Discrete-Time Fourier Transform of the frequency response obtained in part (f).arrow_forward
- Electrical Engineering Major. Course: EE350 ( System Dynamics and control ).arrow_forwardBC:3.4 Consider the LTI (linear time invariant) dis- crete time systems with the following impulse re- sponses, h[n]. For each system, determine whether or not the system is causal or noncausal and whether or not the system is FIR (finite impulse response) or IIR (infinite impulse response). Give a brief justifi- cation. a.) b.) h[n] = (1.25e-j0.35)2—nu[n – 10] h[n] = (1.25e-j0.35π)2—nu[n + 14] c.) h[n] = (1.25e-j0.35π)4-n (u[n + 4] - u[n – 4]) d.) h[n] = (1.25e¯j0.35″)4—nu[n-4]-(1.25e-j0.35″)4—nu[n—6] e.) h[n] = (1.25e¯j0.35″)4—nu[n-4]-(1.25e¯j0.35π)6—nu[n—6]arrow_forwardAnswer parts d and e only please.arrow_forward
- Introductory Circuit Analysis (13th Edition)Electrical EngineeringISBN:9780133923605Author:Robert L. BoylestadPublisher:PEARSON
 Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning
Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education  Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education
Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON
Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,