
Automotive Technology: A Systems Approach (MindTap Course List)
6th Edition
ISBN: 9781133612315
Author: Jack Erjavec, Rob Thompson
Publisher: Cengage Learning
expand_more
expand_more
format_list_bulleted
Related questions
Question
Solve the following without the use of AI. Show all steps. Thank You!

Transcribed Image Text:8.
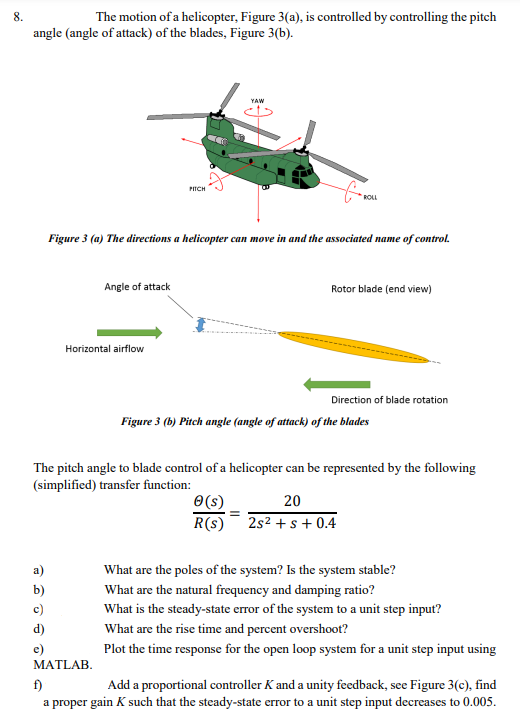
The motion of a helicopter, Figure 3(a), is controlled by controlling the pitch
angle (angle of attack) of the blades, Figure 3(b).
PITCH
YAW
ROLL
Figure 3 (a) The directions a helicopter can move in and the associated name of control.
Angle of attack
Horizontal airflow
Rotor blade (end view)
Direction of blade rotation
Figure 3 (b) Pitch angle (angle of attack) of the blades
The pitch angle to blade control of a helicopter can be represented by the following
(simplified) transfer function:
e(s)
R(s)
20
2s² + s + 0.4
What are the poles of the system? Is the system stable?
b)
What are the natural frequency and damping ratio?
c)
d)
What is the steady-state error of the system to a unit step input?
What are the rise time and percent overshoot?
e)
MATLAB.
f)
Plot the time response for the open loop system for a unit step input using
Add a proportional controller K and a unity feedback, see Figure 3(c), find
a proper gain K such that the steady-state error to a unit step input decreases to 0.005.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 5 images

Knowledge Booster

Similar questions
- 1) A slider-crank mechanism is a planar mechanism that performs a conversion between the translational motion of a slider and the rotational motion of a crank. It is used in many different engineering applications. A familiar example will be a piston engine. In Figure 1, a basic slider- crank mechanism is shown. В b dạc Figure 1. A basic slider-crank mechanism 0< 0< 2n; b = 20 cm; I= 50 cm 1- Find the angle of Ø and the distance of dAC as a function of 0. 2- If crank AB has a rotational speed of w = 1000 rev/min; find velocity of C (Vc) and velocity and acceleration of link BC (vBC & aBC)arrow_forwardEnergy Star Washing Machine Model #: GTW500ASN Style: Top Loader Cubic Feet: 4.5 cubic feet Yearly Energy Usage (from Energy Guide): 210 kWh/y Non-Energy Star Washing Machine Model #: GTW465ASN Style: Top Loader Cubic Feet: 4.5 cubic feet Yearly Energy Usage (from Energy Guide): 175 kWh/yr Picture of Appliance: Website Link to Retail Store Purchase Price: (1) $498.00 Yearly Energy Use (in kWh): 175 kWh/yr Energy Cost per Year (Energy usage in kWh from above x .1111 cents/kWh): (3) Cost Recuperation Estimation 1 Picture of Appliance: Website Link to Retail Store Purchase Price: (2) $478.00 Yearly Energy Use (in kWh): 210 kWh/yr Energy Cost per Year (Energy usage in kWh from above x.1111 cents/kWh): (4) Initial Cost Difference: Energy Star Appliance Price (1) - Non-Energy Star Appliance Price (2) Calculation (Show Your Work): This is the original upfront price difference. In other words, how much more money the Energy-Star Appliance costs. 2. Cost Per Year Difference: Non-Energy Star…arrow_forwardHow will you differentiate the three flight control systems used in large aircraft? (Mechanical, Hydromechanical, and Fly-by-wire)arrow_forward
- 4 Control technologies which are commonly used in aircraft include: (A) cables, ailerons, flaps, rudder. (B) digital systems, wind gauge, altimeter, pitot tube. (C) radar, wireless technology, digital systems, hydraulics. (D) fly by wire, solenoid controls, hydraulic, digital systems. (THU) compon suporligilarrow_forwardOn a rotor wing NVG flight, your aircrew is circling (clockwise) a target area illuminated by an aerial parachute flare. The door gunner on the side of the aircraft opposite the flare (left) notices the ground getting closer and calls, "knock it off". What visual illusion just occurred and which aircrew member(s) were affected? OA. Moth effect; pilot, copilot, right door gunner OB. False horizon; left door gunner OC. Lean-on-the-sun illusion; all crew members O D. G-excess; left door gunnerarrow_forwardCould you mathematically explain static forces on 3 DOF Planar Redundant Robotic Manipulator?(torque) If this manipulator picks up a 10kg object, calculate its torque. With the end effector fixed, will the joint torques change? If so, how will the engine selection be affected?arrow_forward
- label the oarts of otto enhinearrow_forwardInstrumentation & Measurements This homework measures your capability to design/analyze various components/variables of ameasurement system based on what you have studied. Question 1 Attached.arrow_forwardSystem for shorter flight times With his invention, Håkan Lans has made it possible to shorten flight times. Thanks to his invention, a pilot can see the exact positions of other aircraft. ( what is the right answer? Registered design Logo Patent d. Copyrightarrow_forward
- Why can’t a drone fly with a single rotor only? What are the fundamental physics principles at play>arrow_forwarda. Currently, you serve as a robotic engineer by a company, and your boss want you to design a robot in spatial space to satisfy the following conditions: i. Max reachable distance of the robot is 1 meter. ii. Only using revolute joints, connecting links and rigid load bearing links (the length of link is 0.5m). iii. The degree of freedom (Dof) of the robot is 2. What is your design, how many joints and links will you use? b. The payload of your design is 10 kg (each load bearing link can hold 5 kg, 5 kg+5 kg=10kg, the weight and payload of the connecting links will be ignored), but your boss wants your designed robots to handle 20 kg payload. How will you update your current design, and how many joints and links will you use in the new design? What is the Dof of the new designed robot.arrow_forwardPlease analyze and answer thank youuuuarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Automotive Technology: A Systems Approach (MindTa...Mechanical EngineeringISBN:9781133612315Author:Jack Erjavec, Rob ThompsonPublisher:Cengage Learning
Automotive Technology: A Systems Approach (MindTa...
Mechanical Engineering
ISBN:9781133612315
Author:Jack Erjavec, Rob Thompson
Publisher:Cengage Learning