
Introductory Circuit Analysis (13th Edition)
13th Edition
ISBN: 9780133923605
Author: Robert L. Boylestad
Publisher: PEARSON
expand_more
expand_more
format_list_bulleted
Related questions
Question
thumb_up100%
Please explain step by step in detail. I am most confused about the table. Thank you
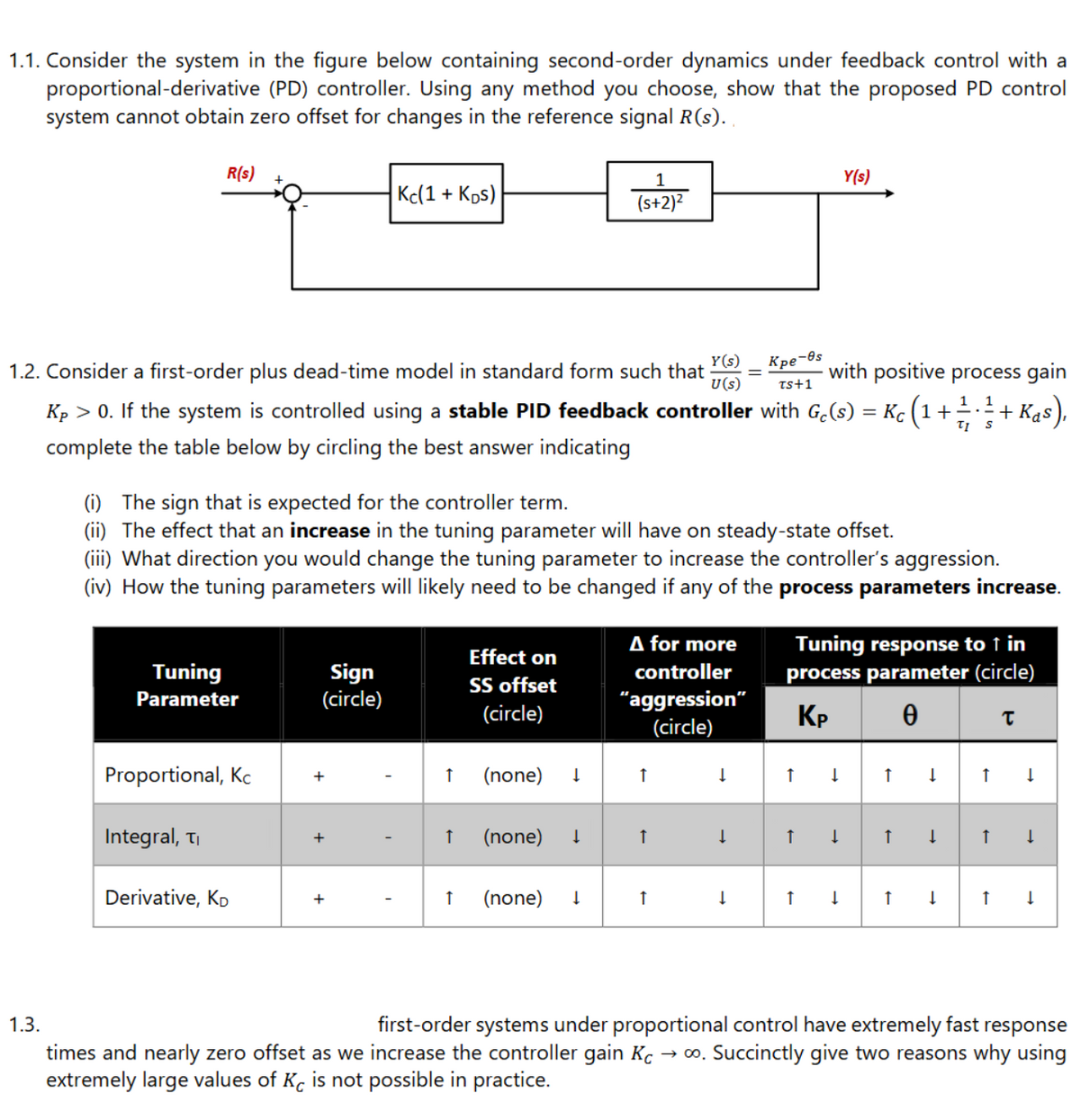

Transcribed Image Text:1.1. Consider the system in the figure below containing second-order dynamics under feedback control with a
proportional-derivative (PD) controller. Using any method you choose, show that the proposed PD control
system cannot obtain zero offset for changes in the reference signal R(s)..
R(s)
Kc(1+ KDS)
1
(s+2)²
Y(s)
1.2. Consider a first-order plus dead-time model in standard form such that
Y(s)
Kpe-0s
U(s) TS+1
with positive process gain
1.3.
Kp > 0. If the system is controlled using a stable PID feedback controller with G₁(s) = Kc (1 + ±1. 1½ + Kas),
complete the table below by circling the best answer indicating
(i) The sign that is expected for the controller term.
(ii) The effect that an increase in the tuning parameter will have on steady-state offset.
TI S
(iii) What direction you would change the tuning parameter to increase the controller's aggression.
(iv) How the tuning parameters will likely need to be changed if any of the process parameters increase.
Tuning response to ↑ in
process parameter (circle)
Tuning
Parameter
Sign
(circle)
Effect on
SS offset
A for more
controller
"aggression"
(circle)
(circle)
KP
0
τ
Proportional, Kc
+
↑
(none) ↓
↑
↓
↑
↓
↑
↓
↑
↓
Integral, ti
↑ (none) ↓
↑
↓
↑
↓
↑
↓
↑
↓
Derivative, KD
+
↑ (none) ↓
↑
↓
↑
↓
↑
↓
↑
↓
first-order systems under proportional control have extremely fast response
times and nearly zero offset as we increase the controller gain Kc → ∞. Succinctly give two reasons why using
extremely large values of Kε is not possible in practice.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by stepSolved in 2 steps with 3 images

Knowledge Booster

Similar questions
- (a) An audio amplifier is to be designed to develop a 50-V peak-to-peak sinusoidal signal at a frequency of 20 kHz. What is the slew-rate specification of the amplifier? (b) Repeat for a frequency of 20 Hz.arrow_forwardFor the model defined in Question , is the closed loop system with the negative feedback control law? a. unstable b.asymptotically stable c.not unstable d.not asymptotically stablearrow_forwardI need the answer as soon as possiblearrow_forward
- 6. Consider the feedback system shown in Figure 5. The process transfer function is marginally stable, The controller is the proportional-derivative (PD) controller G,(s) = K, +Kps. Determine if it is possible to find values of K, and K, such that the closed-loop system is stable. If so, obtain values of the controller parameters such that the steady-state tracking error E(s) = R(s)-Y(s) to a unit step input R(s) =1/s is e, = lim e(t) <0.1 and the damping of the closed-loop system is 5=V2/2. Controller Process E,(s) 4 R(s) Kp+Kps Y(s) +4 erwe Figure 5arrow_forwardPls solve in detail by hand.arrow_forwardElectrical Engineering Major. Course: EE350 ( System Dynamics and control ).arrow_forward
- 1. The DC-DC converter has several circuit configurations. a) (Draw a simple connection of IGBT switch, diode and inductor that can discriminate between Buck, Boost and Buck-Boost converter circuits respectively.) b) ('A Boost converter produces an output voltage, Vo that is more than or equal to the input voltage, Vi. Based on this statement develop the equation for the relationship between Vo Viand D. where D represents the duty ratio. You can use any suitable diagram to illustrate your answer.)arrow_forwardFeedback improves Ex. 220. Refer to Figure 220. disturbance rejection. Given: R=0, controller gain K=50, and a unit step disturbance, (i.e. D(s) = 1/s), determine the steady state output, Css, when: A) the loop is closed with H=1, and B) the loop is open with H=0. ans:2arrow_forwardQUESTION4 Consider the feedback system in the figure with G(s) Using the Ziegler-Nichols Oscillation Method. %3D (s+1)(s+3)(s+10) for an ideal PID controller C(s) - K, ++ Kps determine the gains K K, and K. Choose the closest set of gains. C(s) G(s) OK, - 18, K, = 12.81, K, = 6.32 O Kp = 4.80, K, = 2.65, Kp = 2.18 O Kp - 47.52, K, = 85.57, K, - 12.60 %3D O K, - 68.64, K, = 143.27, Kp = 8.22arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Introductory Circuit Analysis (13th Edition)Electrical EngineeringISBN:9780133923605Author:Robert L. BoylestadPublisher:PEARSON
 Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning
Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education  Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education
Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON
Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:9780133923605
Author:Robert L. Boylestad
Publisher:PEARSON
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:9781337900348
Author:Stephen L. Herman
Publisher:Cengage Learning
Programmable Logic Controllers
Electrical Engineering
ISBN:9780073373843
Author:Frank D. Petruzella
Publisher:McGraw-Hill Education
Fundamentals of Electric Circuits
Electrical Engineering
ISBN:9780078028229
Author:Charles K Alexander, Matthew Sadiku
Publisher:McGraw-Hill Education
Electric Circuits. (11th Edition)
Electrical Engineering
ISBN:9780134746968
Author:James W. Nilsson, Susan Riedel
Publisher:PEARSON
Engineering Electromagnetics
Electrical Engineering
ISBN:9780078028151
Author:Hayt, William H. (william Hart), Jr, BUCK, John A.
Publisher:Mcgraw-hill Education,