Design linkages per the requirements below. Remember ground is also a link with the number of anchor points determining the type of link it is (i.e. binary, ternary, etc.). In each case, draw a clean kinematic diagram followed by a mobility calcula- tion verifying the design requirement: (a) A 2-dof closed chain linkage (at least two points at which the ground is attached to the link) with no structures and fewest possible links; you may use full and half joints only (b) A 1-dof closed chain linkage with no structures and at least 3 binary and 2 ternary links (c) A 2-dof closed chain linkage with fewest possible binary links and single full joints only
Design linkages per the requirements below. Remember ground is also a link with the number of anchor points determining the type of link it is (i.e. binary, ternary, etc.). In each case, draw a clean kinematic diagram followed by a mobility calcula- tion verifying the design requirement: (a) A 2-dof closed chain linkage (at least two points at which the ground is attached to the link) with no structures and fewest possible links; you may use full and half joints only (b) A 1-dof closed chain linkage with no structures and at least 3 binary and 2 ternary links (c) A 2-dof closed chain linkage with fewest possible binary links and single full joints only

Elements Of Electromagnetics
7th Edition
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Sadiku, Matthew N. O.
ChapterMA: Math Assessment
Section: Chapter Questions
Problem 1.1MA

Related questions
Question

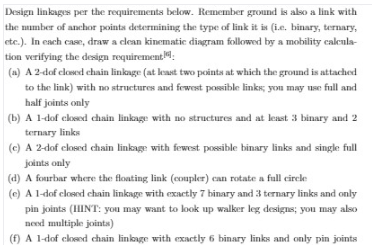
Transcribed Image Text:Design linkages per the requirements below. Remember ground is also a link with
the number of anchor points determining the type of link it is (i.e. binary, ternary,
etc.). In each case, draw a clean kinematic diagram followed by a mobility calcula-
tion verifying the design requirement:
(a) A 2-dof closed chain linkage (at least two points at which the ground is attached
to the link) with no structures and fewest possible links; you may use full and
half joints only
(b) A 1-dof closed chain linkage with no structures and at least 3 binary and 2
ternary links
(c) A 2-dof closed chain linkage with fewest possible binary links and single full
joints only
(d) A fourbar where the floating link (coupler) can rotate a full circle
(e) A 1-dof closed chain linkage with exactly 7 binary and 3 ternary links and only
pin joints (HINT: you may want to look up walker leg designs; you may also
need multiple joints)
(f) A 1-dof closed chain linkage with exactly 6 binary links and only pin joints

Transcribed Image Text:For each of the linkages in Q1, suggest possible applications
Expert Solution
Step 1
Solution:
Given Data and to find:

Trending now
This is a popular solution!

Step by step
Solved in 4 steps with 4 images

Recommended textbooks for you
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press

Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON

Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education

Control Systems Engineering
Mechanical Engineering
ISBN:
9781118170519
Author:
Norman S. Nise
Publisher:
WILEY

Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:
9781337093347
Author:
Barry J. Goodno, James M. Gere
Publisher:
Cengage Learning

Engineering Mechanics: Statics
Mechanical Engineering
ISBN:
9781118807330
Author:
James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:
WILEY